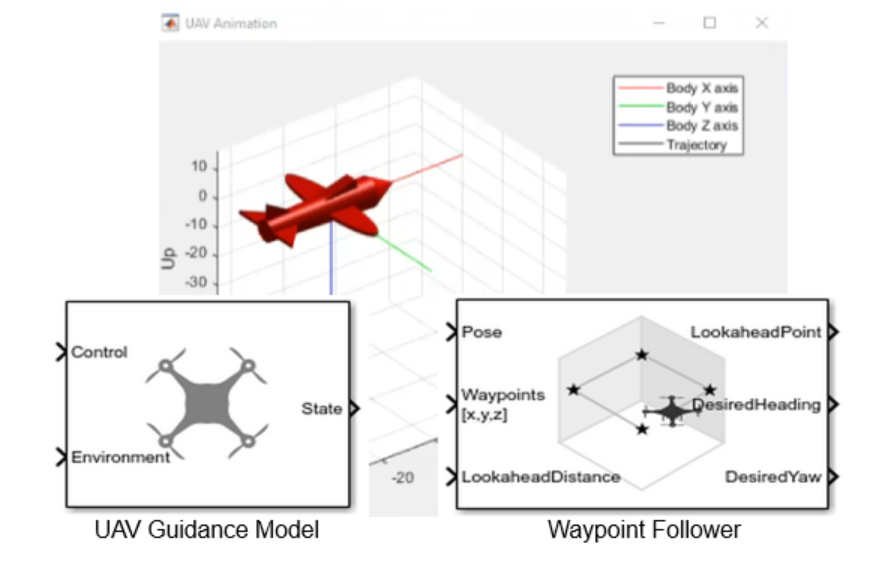
无人驾驶飞行器(无人机)可以使用无人机库建模和控制机器人系统工具箱™函数,对象和块。你可以模拟一个降维指导模型的固定翼无人机和multi-rotor接近一个闭环自动驾驶仪控制器与运动学模型。生成控制命令,无人机状态和环境输入使用给定的函数。路标追随者还提供了基于预定义的路径点执行飞行任务。
新2019年!你也可以连接到MAVLink等客户QGroundControl通过UDP端口与无人机使用MAVLink交换消息通信协议。
机器人系统的无人机图书馆工具箱包含以下参考示例:
•近似高保真用无人机无人机模型指导模型块
•优化路径固定翼无人机的追随者
•使用MAVLink通信协议和加载特定MAVLink方言(新!)