这个提交包含所有文件用于MATLAB和Simulink仿真机器人领域视频,“机器人机械手设计算法”和“控制机器人机械手的关节”金宝app。
文件包括以下:
——一个MATLAB脚本演示如何实现机器人机械手逆运动学算法
-转金宝app矩控制的仿真软件模型的机器人机械手使用构型空间和工作空间控制器
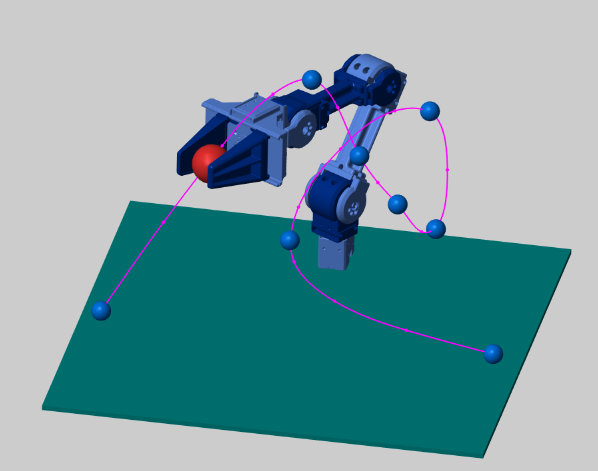
——金宝app机械手使用的仿真软件模型派生的逆运动学算法来接一个对象和遵循的轨迹
——金宝app机械手使用逆运动学的仿真软件模型捕捉空气中的一个对象,说明可能的下一个步骤和感知整合算法
所有文件需要运行脚本和模型,包括CAD文件和URDF文件都包含在提交或下载使用提供的启动脚本。您必须安装Git命令行自动下载机器人描述文件。
为了方便起见,本地副本的Simscape多体物理模型库和Simscape多体接触力库已包含在这个提交。如果你想安装这些库的最新版本,你可以找到如下:
* Simscape多体物理模型库://www.tatmou.com/matlabcentral/fileexchange/37636-simscape-multibody-multiphysics-library
* Simscape多体接触力库://www.tatmou.com/matlabcentral/fileexchange/47417-simscape-multibody-contact-forces-library
引用作为
MathWorks学生竞赛团队(2022)。设计机器人机械手的算法GitHub (https://github.com/mathworks-robotics/designing-robot-manipulator-algorithms)。检索。
MATLAB版本兼容性
创建R2019b
与R2019b后来版本兼容
平台的兼容性
窗户 macOS Linux标签
库/ MPL_Libs
库/ MPL_Libs /库
库/ MPL_Libs /图书馆/ + forcesPS
库/ MPL_Libs /图书馆/ + forcesPS / +液压
库/ MPL_Libs /图书馆/ + forcesPS / +数学
库/ MPL_Libs /图书馆/ + forcesPS / +机械
ScriptsFunctions /初始化
ScriptsFunctions /运动学
ScriptsFunctions /公用事业
库
库/ MPL_Libs /库
模型
问题在这个视图或报告GitHub插件,参观GitHub库。
问题在这个视图或报告GitHub插件,参观GitHub库。