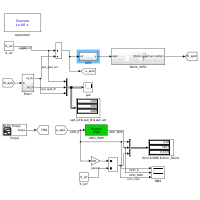
这个项目的主要是展示了如何设计和实现一个自适应PID (APID)的电力系统。自适应PID设计,比较的参考速度与实际速度刷。PID反馈控制电压源的输出连接到一个通用的三相桥,这座桥是连接到一个无刷直流电机。
扭矩是恒定在第一次模拟的0.2秒,然后突然改为10 n检查APID速度控制的能力尽管扭矩变化。
APID模型是改编自以下文章:
自调整PID控制器的自适应交互(https://ieeexplore.ieee.org/abstract/document/879256/)
你也可以找到我的文章另一个实际的例子:
在线自适应功率因数校正控制器直流-直流转换器(https://digital-library.theiet.org/content/conferences/10.1049/cp.2014.1495)
请不要犹豫与我联系,如果你需要任何进一步的信息。
欢呼,
救世主
引用作为
马赫迪Mansouri (2023)。刷速度的自适应PID控制(//www.tatmou.com/matlabcentral/fileexchange/72075-adaptive-pid-for-bldc-speed-control), MATLAB中央文件交换。检索。
| 版本 | 发表 | 发布说明 | |
|---|---|---|---|
| 1.0.0 |