15的结果

大满贯提取导航使用激光雷达传感器和角落

另一个演示我的学生。
此功能非常容易实现扩展卡尔曼滤波的GPS定位的例子
大满贯使用微分机器人的激光传感器区域地图指引。

给出了估计状态空间模型输入的下一个状态

泰德Broida的Matlab实现“从嘈杂的图像对象运动参数估计”

容易实现的扩展卡尔曼滤波器

使用扩展卡尔曼滤波器Multirobot本地化

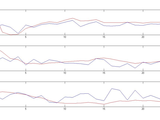
实时EKF的态度估计模型金宝app

卡尔曼滤波器的内部运作。不采用优化和矩阵代数。

我开发了一个传感器融合算法在这个脚本使用2卡尔曼滤波器模拟GPS和IMU传感器

扩展卡尔曼滤波的一个例子
一系列的MATLAB程序,估计无人机的使用传感器测量位置和姿态。