多目标跟踪导论
背景
跟踪对于自主系统的制导、导航和控制至关重要。跟踪系统通过检测(运动学参数和属性)来估计目标(目标数量及其状态)并评估感兴趣区域内的态势环境最简单的跟踪系统是单目标跟踪(STT)在一个无杂乱环境中的系统,它假设一个目标只在一个感兴趣的区域内。STT不需要数据分配或关联,因为独立目标的检测可以直接反馈给用于估计目标状态的估计器或滤波器。
现代跟踪系统通常涉及多目标跟踪(MTT)系统,其中一个或多个传感器对多个目标产生多个检测,并使用一个或多个跟踪来估计这些目标的状态。MTT必须为轨道分配检测,然后才能使用检测更新轨道。MTT分配问题具有挑战性,因为以下几个因素:
目标或检测分布——如果目标是稀疏分布的,那么将目标与其相应的检测相关联就相对容易。然而,如果目标或检测是密集分布的,分配就会变得模糊,因为将目标分配给检测或附近的检测几乎不会在成本上产生任何差异。
探测概率(Pd)传感器的设计-Pd描述如果目标位于传感器视野内,则传感器检测到目标的概率。如果Pd,则在传感器扫描过程中,真实目标可能不会产生任何检测。因此,真实目标所代表的轨迹可能会窃取其他轨迹的检测结果。
传感器分辨率-传感器分辨率决定了传感器区分两个目标探测的能力。如果传感器分辨率较低,那么两个接近的目标可能只会产生一次探测。这违反了通常的假设,即每次检测只能分配到一个轨道,并导致轨道之间不可解决的分配冲突。
传感器的杂波或误报率——误报引入额外的可能分配,因此增加了数据分配的复杂性。
目标和检测的数量-可能分配的数量随着目标和检测的数量的增加呈指数增长。因此,获得最优分配需要更多的计算。
MTT系统的组成部分
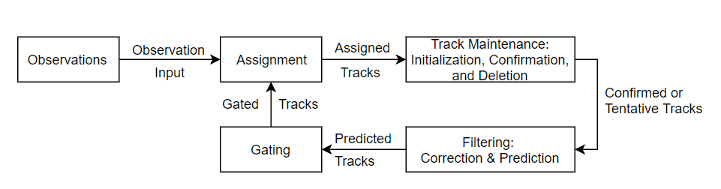
该图给出了一个简单递归MTT系统的功能元素的结构表示[1].在实际应用中,这些元素的功能可以有相当大的重叠。然而,这种表示提供了一种方便的划分,以便在MTT系统中引入典型的功能。
为了解释此图,假设跟踪器保持了先前扫描的确认或试探性轨迹。现在,该系统考虑是否根据从传感器接收到的任何新检测来更新轨迹。将检测分配到相应的轨道:
内部滤波器(如卡尔曼滤波器)预测从前一步到当前步骤的确认或试探性轨迹。
跟踪器使用预测的估计和协方差来围绕预测的轨迹形成一个验证门。
轨道门内的探测被视为轨道分配的候选。
分配算法(基于特定的跟踪器,如GNN或TOMHT)确定跟踪到检测的关联。
跟踪器根据分配执行航迹维护,包括初始化、确认和删除:
未分配的观测值可以启动新的试探性轨迹。
如果音轨的质量满足确认标准,则会确认一条暂定音轨。
低质量的音轨将根据删除标准删除。
新的轨迹集(暂定的和确认的)被预测到下一个扫描步骤,形成验证门。
检测
检测是否有一个集合术语用来指报告输出中包含的所有观测或测量的数量(见objectDetection例如)从一个传感器。一般来说,观测可能包含测量的运动学量(如距离、视线和距离率)和测量的属性(如目标类型、识别编号和形状)。检测还应包含获得测量值的时间。
对于点目标跟踪,从单个传感器扫描接收的检测最多可以包含来自每个目标的一个观测值。这种假设大大简化了分配问题。一个传感器可以在其视野内为目标生成零检测值,因为检测概率,Pd,每个传感器的值通常小于1。此外,每个传感器可以产生不符合真实目标的误报警检测。
高分辨率传感器可能会为每个目标生成多个检测,这需要将检测划分为一个代表性检测,然后再馈送给基于分配的跟踪器(例如跟踪器,trackerJPDA和trackerTOMHT).看到基于雷达和摄像头的公路车辆扩展目标跟踪更多细节。
控制和分配
有关选通和分配的详细信息,请参见跟踪系统中的分配方法介绍,全面介绍了赋值方法。本节只涵盖在三个基于分配的跟踪器中使用的门控和分配的基础知识,跟踪器,trackerJPDA和trackerTOMHT.
门控是一种筛选机制,用于确定哪些检测是更新现有轨道的有效候选。门控的目的是减少跟踪到检测分配过程中不必要的计算。利用预测状态及其相关协方差形成预测轨道的验证门,使关联概率高的检测落在轨道的验证门内。只有在轨道门内的探测才被考虑分配到轨道上。
选通之后,分配函数决定要进行哪些跟踪到检测的分配。三种赋值方法与工具箱中的三个跟踪器一起使用:
跟踪器-全局最接近的数据关联。基于似然理论,GNN方法的目标是最小化考虑所有跟踪到检测任务的总体距离函数。trackerJPDA-联合概率数据关联。JPDA方法应用了软分配,这样在轨道的验证门内的检测都可以根据它们的关联概率对轨道作出加权贡献。trackerTOMHT-面向跟踪的多假设跟踪。与GNN和JPDA不同,MHT是一种延迟决策方法,允许将困难的数据关联情况延迟到收到更多信息。
使用哪种跟踪器取决于目标类型和可用的计算资源:
GNN算法是最简单的。它具有较低的计算代价,对稀疏分布的目标具有良好的跟踪性能。
JPDA算法计算量大,适用于大距离目标。在杂波环境中,它通常比GNN表现得更好。
TOMHT跟踪器需要大量计算资源,通常会在所有三种跟踪器中获得最佳性能,特别是对于密集分布的目标。
有关详细信息,请参见在模糊状态下跟踪近距离目标这三个跟踪器的比较示例。
轨道维护
航迹维护是指航迹的起始、确认和删除功能。
跟踪起始.当检测未分配给现有轨迹时,可能需要创建新轨迹:
GNN方法在没有分配给现有轨道的观测数据上开始新的试探性轨道。
JPDA方法在观测值分配概率低于指定阈值的情况下开始新的试探性跟踪。
MHT方法根据与现有轨道的距离大于指定阈值的观测结果开始新的试运行轨道。跟踪器使用后续数据来确定哪些新启动的跟踪是有效的。
航迹确认.一旦形成了试探性的轨道,就会有一个确认逻辑来确定轨道的状态。工具箱中使用了三个轨道确认逻辑:
历史逻辑:如果轨迹已分配给检测至少一个时间,则确认轨迹米上一次更新期间的更新N更新。您可以设置的特定值米和N.
跟踪器和trackerJPDA用这个逻辑。轨迹评分逻辑:如果一个轨迹的评分高于指定的阈值,则确认该轨迹。track score越高,意味着track越有可能是有效的。分数是该轨迹从真实目标出发的概率与该轨迹为假的概率之比。
跟踪器和trackerTOMHT用这个逻辑。集成逻辑:如果航迹的集成存在概率高于阈值,则确认航迹。
trackerJPDA使用这个逻辑。
记录删除。如果在合理的时间内未更新,则会删除轨迹。轨迹删除标准与轨迹确认标准类似:
历史逻辑:如果一个轨道至少没有被分配给一个检测,那么该轨道将被删除P次去年R更新。
音轨评分逻辑:音轨的评分从最大评分下降到指定阈值后,音轨将被删除。
集成逻辑:如果一个轨道的集成存在概率低于指定的阈值,则该轨道将被删除。
有关详细信息,请参见轨道逻辑概论实例
过滤
跟踪滤波器的主要功能有:
预测到当前时间的轨迹。
计算从预测轨道到检测的距离和相关的可能性门和分配。
使用指定的检测来校正预测轨迹。
传感器融合与跟踪工具箱™ 提供多个跟踪过滤器,可用于三个基于分配的跟踪器(跟踪器,trackerJPDA和trackerTOMHT).有关这些过滤器的全面介绍,请参阅估计滤波器简介.
跟踪指标
传感器融合和跟踪工具箱提供了分析跟踪性能的工具,如果真相是已知的:
你可以用
trackAssignmentMetrics评估轨道分配和维护的绩效。trackAssignmentMetrics提供索引,例如轨道交换的数量、发散步骤的数量和冗余分配的数量。你可以用
跟踪误差度量评估跟踪的准确性。跟踪误差度量提供多个均方根(RMS)误差值,从数值上说明了跟踪器的精度性能。你可以用
轨道光度法计算最佳子模式分配度量。跟踪误差度量提供三个标量错误组件-定位错误、标签错误和基数错误,以评估跟踪性能。
Non-Assignment-Based追踪器
跟踪器,trackerJPDA和trackerTOMHT是基于分配的跟踪器,这意味着需要跟踪到检测分配。工具箱还提供基于随机有限集(RFS)的跟踪器,trackerPHD.您可以使用它的支持特性金宝appggiwphd跟踪扩展的物体和gmphd跟踪扩展对象和点目标的步骤。
另请参阅
跟踪器|gmphd|trackerJPDA|trackerTOMHT|trackerPHD|ggiwphd|objectDetection
工具书类
S. Blackman和R. Popoli。现代跟踪系统的设计与分析。Artech House雷达图书馆,波士顿,1999年。
D. Musicki和R. Evans。联合集成概率数据关联:JIPDAIEEE航空航天和电子系统汇刊。第40卷第3期,2004年,第1093 -1099页。
威尔斯曼,J. R..“多假设跟踪的计算效率版本的一步一步描述”在国际光学和光子学学会,第1698卷,第228-301页,1992年。
您还可以从以下列表中选择网站: