导航对于移动机器人的应用至关重要,比如最大空间覆盖的家庭清洁,仓库和医院的物流机器人的货物递送,等等。导航方面的挑战包括3D地图导入或构建(如SLAM)、路径规划和避免碰撞。本次网络研讨会分为两个部分,我们将演示如何在Simulink中用Adept移动机器人(Pioneer 3-DX)的CAD模型开发和模拟避碰算法。金宝app在验证算法在桌面仿真中有效后,您可以通过使用相同的Simulink模型在真实机器人上无缝地测试算法,而无需重新实现算法。金宝app
在操作真实硬件之前对不同的机器人算法进行仿真,可以使机器人研究人员更多地关注算法的开发,减少对硬件调试的担忧。与此同时,它也让机器人教学变得更实惠。每个学生并不需要使用昂贵的机器人来学习机器人技术的各种概念。有时可能是系里有预算(除了学生的预算),可能整个班级只有一个机器人。
在第1节中,我们将演示如何:
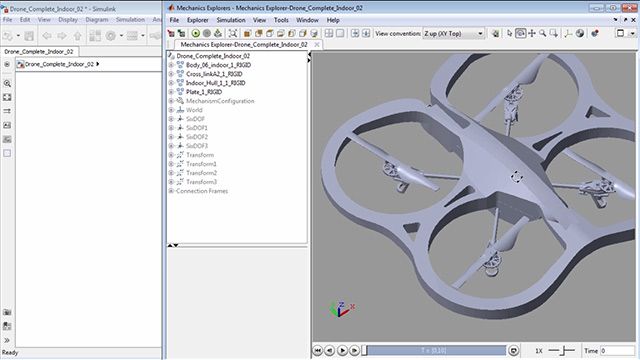
- 准备您的CAD模型,以便将其导入SimMechanics。
- 导入CAD模型。
- 向关节添加驱动器。
- 增加关节的运动约束。
在第2节中,我们将演示如何:
- 创建一个3D环境。
- 在Simulink中模拟虚拟传感器。金宝app
- 使用statflow设计和模拟一个碰撞避免算法。
- 在真实的机器人上测试算法。
关于演示者:Swarooph Seshadri是Mathworks的应用支持工程师。金宝app他的兴趣是动态系统的物理建模和为他们设计控制系统。Swarooph持有Texas A&M University College Station的机械工程硕士学位。