导航工具箱
自主导航设计,模拟和部署算法
导航工具箱™提供的算法和分析工具,运动规划,同步定位和映射(SLAM)和惯性导航。所述工具箱包括自定义的搜索和基于采样的路径规划人员,以及用于验证和比较路径度量。You can create 2D and 3D map representations, generate maps using SLAM algorithms, and interactively visualize and debug map generation with the SLAM map builder app. The toolbox provides sensor models and algorithms for localization. You can simulate and visualize IMU, GPS, and wheel encoder sensor data, and tune fusion filters for multi-sensor pose estimation.
提供了用于自动驾驶,机器人,和消费电子应用的参考例子。您可以通过直接部署他们的硬件(与MATLAB编码器™或Simulink的编码器™)测试你的导航算法。金宝app




产品资源:
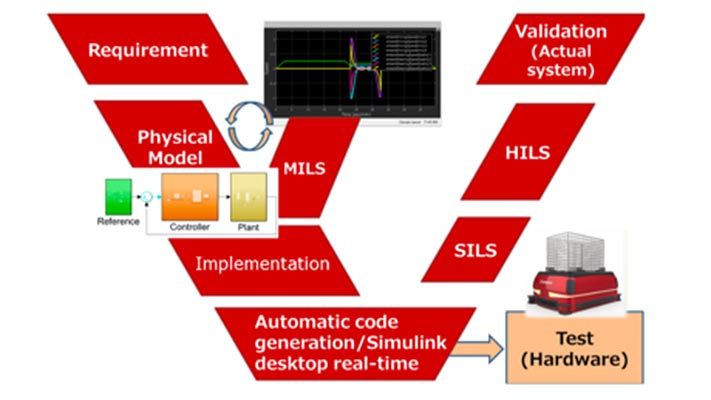
“使用MATLAB和SIMULINK金宝app,我们为运动控制器设计了一种原型,并在一个月内在硬件上测试。评估本地化算法,通过执行模拟阐明挑战。“
村上竹本和Kenneth雷尼辛巴,武藏精密株式会社实业有限公司


