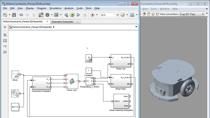
加入Sebastian Castro,他概述了一个基于模拟的设计和控制两腿步行机器人的工作流程。
在这个视频中,Sebastian向您展示了如何利用MATLAB®及其用于自动化Simulink设计活动的工具箱金宝app®模型。具体来说,本演示使用全局优化工具箱中的遗传算法功能来为步行机器人找到最优的运动轨迹。
Sebastian强调了设置优化输入和选项、从MATLAB运行Simulink模型来计算优化成本以及加速重复模拟的技术。金宝app
您可以在本视频中找到示例模型MATLAB中央文件交换.
欲了解更多信息,请访问以下资源: