卡尔曼
设计状态估计的卡尔曼滤波器
语法
描述

例子
设计单控单控装置的卡尔曼滤波器
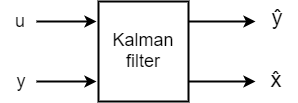
设计具有添加性白噪声的植物的卡尔曼滤波器w在输入和v在输出上,如下图所示。

假设该工厂具有以下状态空间矩阵,并且是具有未指定采样时间的离散时间工厂(Ts = 1).
A = [1.1269 -0.4940 0.1129 1.0000 000 1.0000 0];B = [-0.3832 0.5919 0.5191];C = [1 0 0];D = 0;工厂= ss (A, B, C, D, 1);工厂。我nputName ='联合国';plant.outputname =.'yt';
使用卡尔曼,您必须提供一个模型SYS.这是噪声的输入w.因此,SYS.与...不同植物,因为植物需要输入UN = u + w.你可以构建SYS.通过为噪声输入创建求和结。
sum = sumblk('un = u + w');sys = connect(植物,总和,{“u”,' w '},'yt');
同样地,你可以用sys = plant * [1 1].
指定噪声协方差。因为工厂有一个噪声输入和一个输出,这些值是标量。在实践中,这些值是系统中噪声源的属性,是通过测量或系统的其他知识确定的。对于本例,假设两个噪声源都有单位协方差且不相关(N= 0)。
Q = 1;R = 1;N = 0;
设计过滤器。
[kalmf L P] =卡尔曼(sys, Q, R, N);大小(kalmf)
具有4个输出,2个输入和3个状态的状态空间模型。
卡尔曼过滤器kalmf.是一个有两个输入和四个输出的状态空间模型。kalmf.以植物的输入信号作为输入u和嘈杂的工厂输出
.第一个产量是估计的真实植物产量
.剩下的三个产出是国家估计
.的输入和输出名称kalmf.来看看卡尔曼相应地标签。
kalmf.inputname.
ans =2x1细胞{' u '}{“欧美”}
kalmf。OutputName
ans =4 x1细胞{'yt_e'} {'x1_e'} {'x2_e'} {'x3_e'}
检查卡尔曼收益l.对于一个有三个州的SISO工厂,l是一个三元素列向量。
l
L =3×10.3586 0.3798 0.0817
有关显示如何使用的示例kalmf.由于噪音降低测量误差,请参阅卡尔曼滤波.
MIMO装置的卡尔曼滤波器设计
考虑一个有三个输入的工厂,其中一个表示过程噪声w,以及两个测量输出。该工厂有四个州。

假设下列状态空间矩阵,创建SYS..
a = [-0.71 0.06 -0.19 -0.17;0.06 -0.52 -0.03 0.30;-0.19 -0.03 -0.24 -0.02;-0.17 0.30 -02 -02-0.41];B = [1.44 2.91 0;-1.97 0.83 -0.27;-0.20 1.39 1.10;-1.2 0 -0.28];C = [0 -0.36 -1.58 0.28;-2.05 0 0.51 0.03]; D = zeros(2,3); sys = ss(A,B,C,D); sys.InputName = {'U1','U2',' w '};sys。OutputName = {'y1','y2'};
因为工厂只有一个过程噪声输入,协方差问是一个标量。对于本例,假设过程噪声具有单位协方差。
Q = 1;
卡尔曼使用问确定已知哪些输入以及哪些输入是噪声输入。对于标量问,卡尔曼假设有一个噪声输入并使用最后一个输入,除非您另有规定(参见植物有未测量的输出).
对于两个输出的测量噪声,指定一个2 × 2噪声协方差矩阵。对于本例,第一个输出使用单位方差,第二个输出使用1.3的方差。将非对角线值设置为零,表示两个噪声通道是不相关的。
R = [1 0;0 1.3);
设计卡尔曼滤波器。
[kalmf L P] =卡尔曼(sys, Q, R);
检查输入和输出。卡尔曼使用InputName,OutputName,InputGroup,OutputGroup属性kalmf.来帮助你跟踪输入和输出kalmf.代表。
kalmf.inputgroup.
ans =结构体字段:KnownInput: [1 2] Measurement: [3 4]
kalmf.inputname.
ans =4 x1细胞{'u1'} {'u2'} {'y1'} {'y2'}
kalmf。OutputGroup
ans =结构体字段:产权:[1 2]偏见:[3 4 5 6]
kalmf。OutputName
ans =6x1细胞{'y1_e'} {'y2_e'} {'x1_e'} {'x2_e'} {'x3_e'} {'x3_e'} {'x4_e'}
这两个输入是已知的U1.和U2.前两个输入是kalmf.和两个测量输出y1.和Y2.是最后两个输入kalmf..对于输出kalmf.,前两个是估计输出,其余四个是状态估计。使用卡尔曼滤波器,连接这些输入到工厂和噪声信号,以一种类似的方式显示的SISO工厂在卡尔曼滤波.
植物有未测量的输出
考虑一个有四个输入和两个输出的设备。第一个和第三个输入是已知的,而第二个和第四个输入代表过程噪声。工厂也有两个输出,但只有第二个输出被测量。

使用以下状态空间矩阵创建SYS..
A = [-0.37 0.14 -0.01 0.04;0.14 -1.89 0.98 -0.11;-0.01 0.98 -0.96 -0.14;0.04 -0.11 -0.14 -0.95];B = [-0.07 -2.32 0.68 0.10;-2.49 0.08 0 0.83;0 -0.95 0 - 0.54;-2.19 0.41 0.45 0.90];C = [0 0 -0.50 -0.38;-0.15 -2.12 -1.27 0.65]; D = zeros(2,4); sys = ss(A,B,C,D,-1);%离散与未指定的采样时间sys.InputName = {'U1','W1','U2','w2'};sys。OutputName = {“云”,“ym”};
使用卡尔曼为设计该系统的滤波器,使用已知的和传感器输入参数,用于指定工厂的输入,并测量输出。
已知= [1 3];传感器= [2];
指定噪声CoviRACE并设计过滤器。
q =眼睛(2);R = 1;N = 0;[kalmf,l,p] =卡尔曼(SYS,Q,R,N,传感器,已知);
检查的输入和输出标签kalmf.显示过滤器期望和输出返回的输入。
kalmf.inputgroup.
ans =结构体字段:众所周知:[1 2]测量:3
kalmf.inputname.
ans =3 x1细胞{'U1'} {'U2'} {'ym'}
kalmf.的两个已知输入作为输入SYS.的噪声测量输出SYS..
kalmf。OutputGroup
ans =结构体字段:输出:1 StateEstimate: [2 3 4 5]
的第一个输出kalmf.它估计了测量植物输出的真实值。剩余的输出是状态估计。
输入参数
SYS.- - - - - -带有过程噪声的工厂模型
SS.模型

R- - - - - -测量噪声协方差
标量|矩阵
测量噪声协方差,指定为标量或Ny-经过-Ny矩阵,其中Ny为植物产出的数量。卡尔曼假设测量噪声v白噪声是否有协方差R=E(VV.T).当工厂只有一个输出通道时,R标量是等于方差的标量v.当设备有多个输出通道且测量噪声不相关时,R是一个对角线矩阵。在实践中,您需要为R通过测量或对系统的噪声特性进行有根据的猜测。
有关测量噪声协方差的其他限制,请参阅限制.
N- - - - - -噪声协方差交叉
0(默认)|标量|矩阵
噪声交叉协方差,指定为标量或Ny-经过-Nw矩阵。卡尔曼假设过程噪声w和测量噪声v满足N=E(WV.T).如果两个噪声源不相关,可以省略N,它相当于设置n = 0..在实践中,您需要为N通过测量或对系统的噪声特性进行有根据的猜测。
传感器- - - - - -测量的输出SYS.
向量
测量的输出SYS.,指定为一个索引向量,该索引向量标识哪些输出SYS.测量。例如,假设您的系统有三个输出,但只有其中两个被测量,对应于的第一个和第三个输出SYS..在本例中,set传感器= [1 3].
已知的- - - - - -已知的投入SYS.
向量
已知的投入SYS.,指定为索引向量,标识哪些输入是已知的(确定性)。例如,假设您的系统有三个输入,但只有第一个和第二个输入是已知的。在本例中,set已知= [1 2].卡尔曼解释任何剩余的输入SYS.随机。
输出参数
Mx,我的- 国家估算员的创新收益
大批
限制
工厂和噪声数据必须满足:
(C,一个)为可检测的,其中:
和 , 在哪里
在连续时间或离散时间的单位圆上没有在假想轴上没有无法控制模式。
算法
你也可以从以下列表中选择一个网站: