文档帮助中心
同时定位和映射(SLAM)同时使用映射和定位和姿态估计生成地图并同时在地图中定位车辆的算法。使用利达拉姆调整自己的SLAM算法,该算法处理lidar扫描和里程姿态估计,以迭代方式构建地图。使用构建图获取记录和过滤的数据以使用SLAM创建地图。这个地图生成器应用程序允许您手动修改相对姿势和对齐扫描,以提高地图的准确性。
利达拉姆
构建图
波塞格拉夫
波塞格拉夫3d
地址扫描
添加相对位置
优化图
拆卸操作盖
扫描和姿势
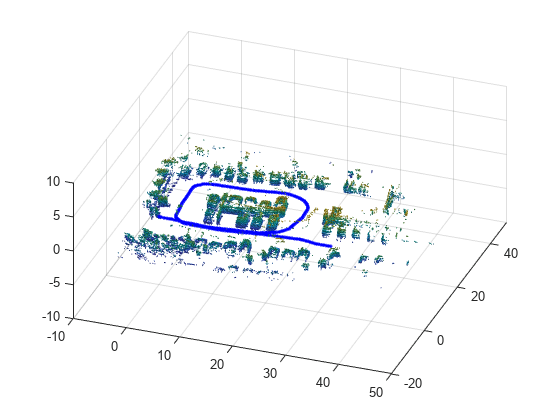
演示如何使用点云处理算法和位姿图优化来实现对采集的三维激光雷达传感器数据的同步定位和映射(SLAM)算法。这个例子的目的是估计机器人的轨迹,并从三维激光雷达点云和估计的轨迹创建环境的三维占用图。
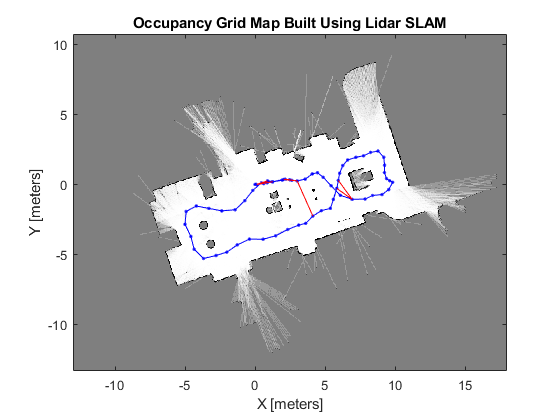
演示如何使用姿势图优化在收集的一系列激光雷达扫描上实现同步定位和映射(SLAM)算法。这个例子的目的是建立一个使用激光雷达扫描和检索机器人的轨迹的环境地图。
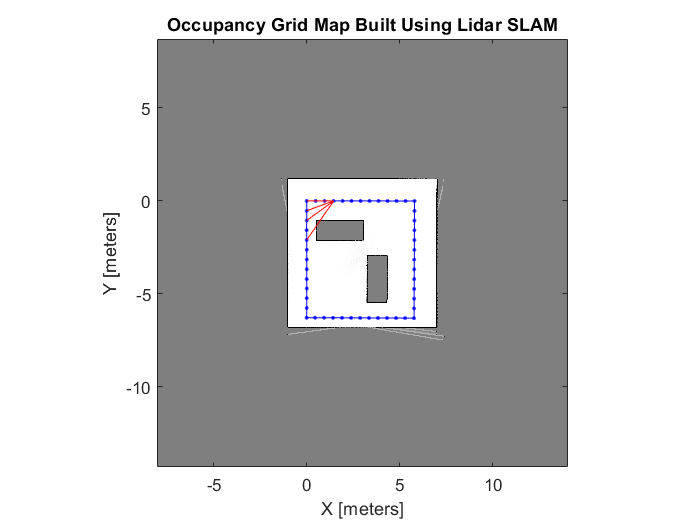
介绍了如何利用位姿图优化技术,在模拟环境下获得的激光雷达扫描图像上实现同步定位与映射(SLAM)算法。本例需要Simulink®3D动画™ 和导航工具箱™.金宝app
您单击了与此MATLAB命令对应的链接:
通过在MATLAB命令窗口中输入命令来运行该命令。Web浏览器不支持MATLAB命令。金宝app
选择一个网站以获取可用的翻译内容,并查看本地活动和优惠。根据您的位置,我们建议您选择:.
也可以从以下列表中选择网站:
选择中国网站(中文或英文)以获得最佳网站性能。其他MathWorks国家/地区网站未针对您所在位置的访问进行优化。
联系当地办事处
现在接受审判