什么是计算机视觉工具箱?
Avi Nehemiah,Mathworks
使用计算机Vision Toolbox™设计和模拟计算机视觉和视频处理系统。
计算机Vision Toolbox为计算机视觉和视频处理系统的设计和仿真提供算法和工具。您可以检测和跟踪视频帧中的对象,识别对象,校准摄像机,执行立体声视觉和过程3D点云。您可以检测面部,面部特征和行人等对象,并创建自己的探测器。
工具箱提供算法和功能以创建图像识别和图像检索系统。一种可用的方法来做这是使用袋式方法。您可以通过选择和分配感兴趣的对象并培训分类器来创建自己的对象检测或识别系统。可以使用KLT和Kalman滤波器算法随时间跟踪检测到的对象。在该示例中,使用KLT算法用特征点跟踪跟踪面部。
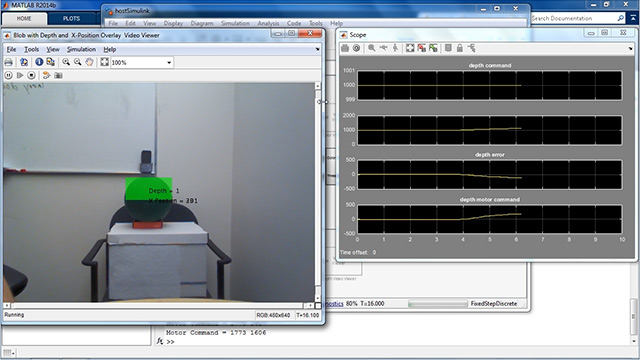
对于3D计算机愿景,您可以使用相机校准器和立体声相机校准应用程序校准单个和立体声相机。使用立体声愿景,您可以计算场景中的点深度并执行3D重建。3D点云处理技术用于处理来自3D传感器的数据,例如LIDARS,立体声和RGB-D相机。
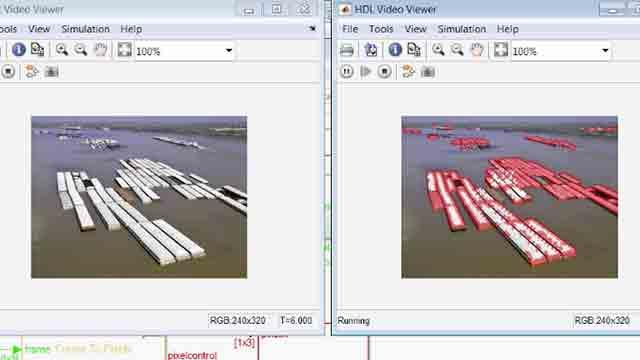
您可以在3D点云中注册和缝合3D点云并适合几何形状。特征检测,提取和匹配可用于解决许多计算机视觉问题,包括图像配准和对象检测。该工具箱还包括超过50个Simulink金宝app®块。如该示例所示,检测道路上的车道标记以确定车辆何时从其车道脱离车道。
工具箱还支持使用MATLAB Co金宝appder™的C代码生成。有关计算机Vision Toolbox的更多信息,请返回产品页面或选择下面的链接。
产品焦点
相关视频和网络研讨会















您还可以从以下列表中选择一个网站: