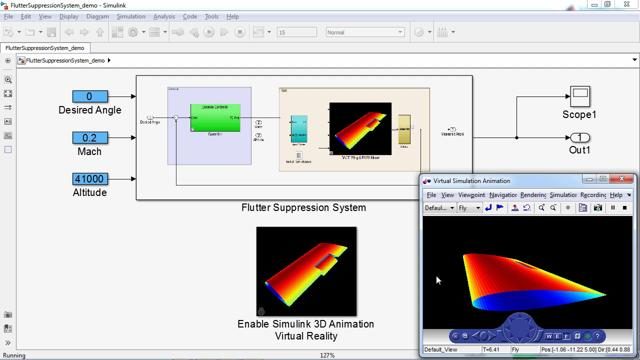
我作为主要机器人控制系统工程师来了,因此我开发了我们在我们后面的机器人的控制系统,GRX用于导管控制和操纵。当我来了,我所做的第一件事是我开始建立系统,并模拟它们。我模拟了Simulink中的那些。金宝app我开始设计涉及手头产品的所有控制法律。
我所要做的就是尽可能地对系统进行高水平的建模,理解,得到正确的数学,得到正确的算法,然后进行模拟。然后当我们需要一个平台来运行它时,我使用了带有现成放大器的Speedgoat。在很短的时间内,我们基本上得到了一个在动物模型中进行体内测试的工作系统,来验证我们确实可以在病人体内安全地操作导管。
所以我有一个实时视频捕获系统。我将用JPEG压缩它。然后我要把它砍掉,通过网络发送它,然后重新组装该图像,然后实时向医生展示它。与此同时,SpeedGeat支持进行精度时间协议的能力。金宝app因此,我必须设计一个可以利用Mathworks所拥有的PTP支持的系统。金宝app
我们以为可以通过加密网络同步时钟。因此,我们面临的挑战是,我们不仅需要知道事件发生的时间,以便安全地对患者进行干预,而且我们还需要安全通道。所以我开发的系统可以让我们来回发送数据包,而高速山羊完全没有意识到。他们以为他们在同一个网络上。
但是我需要能够确切地知道事件发生。我想使用精确时间协议来做。问题是您不能有一个具有精确时间协议的时钟。
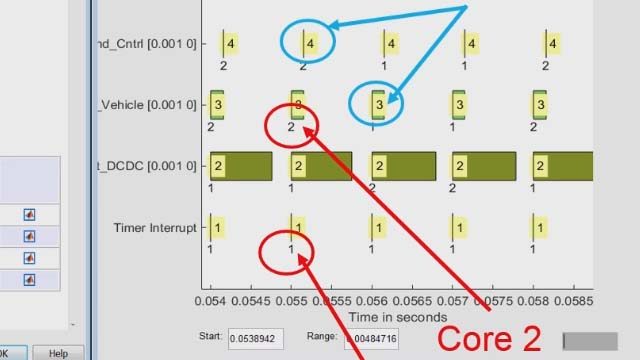
所以我们选择继续前进,在每个地点都有两个时钟。然后我们就能准确地知道两个地点之间的时间延迟。我们不仅可以测量延迟,我们还可以注入延迟这样我们就可以看到你是否可以安全地完成干预在不同类型的延迟下为了描述这些结果是什么。然后我们可以安全地使用它来确保医生不会有太大的延误。
但我们有一个远程呈现系统,以便您可以基本上联系另一侧。我们有一个在两个网站之间创建的隧道,以便我们知道我们的所有系统都是如此。然后我们基本上提出了本地和偏远的一侧。然后你看到的下一件事是你看到视频。你有实时荧光,你有那里的血液动力学来监测患者的健康状况。而且你完全知道时间延迟是什么。
因此,我对机器人使用的电机具有连续时间模型。显然,我建模了运动学和一些与滑块和东西涉及的物理,所以类似于导管控制。
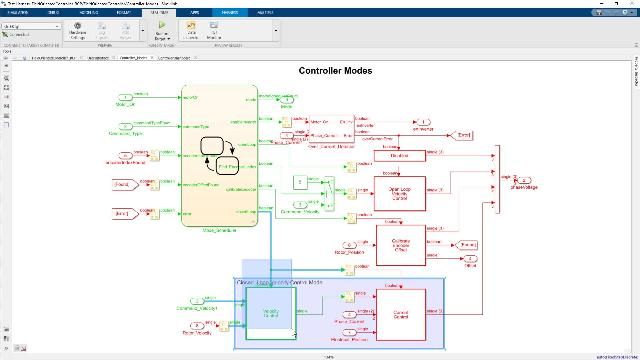
在控制方面,我们建立了所有的离散算法。它的大部分是使用在Simulink环境中运行的嵌入式MATLAB块编写的。金宝app
然后你将替换工厂的模拟,然后你只需拥有实际的机器人。然后,您将继续使用Simulink实时运行机器人上的那些算法。金宝app你实际上与机器人合作,所以当我知道它在机器人上时,它会尽我所期望的事情。