视频和网络研讨会
来自系列:马斯机器人挑战的使命
Mathieu Cuenant,Mathworks冠状动作
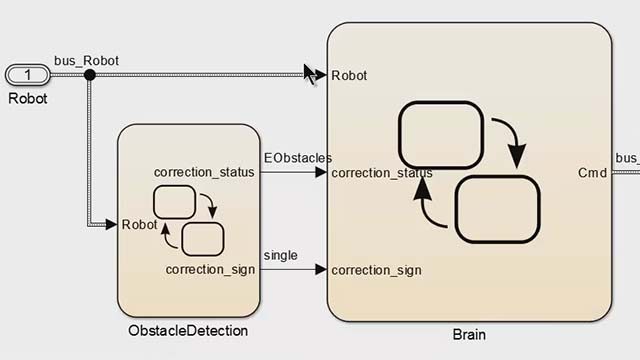
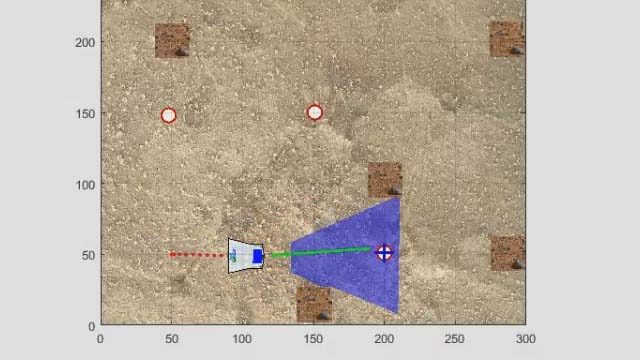
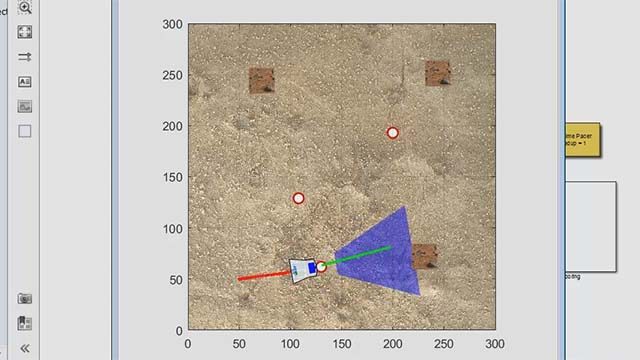
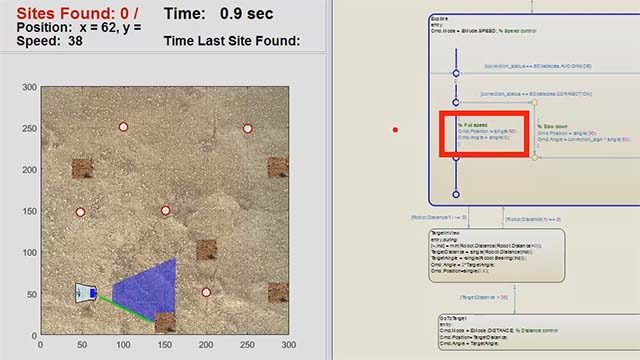
用于轮式机器人的简单位置估计概述,即基于相对车轮角度信息评估绝对机器人位置的算法。
反馈
特色产品
查看更多相关视频
选择一个网站
选择一个网站,以便在可用的地方进行翻译的内容,并查看本地活动和优惠。根据您的位置,我们建议您选择:。
您还可以从以下列表中选择一个网站:
选择中国网站(以中文或英文)以获取最佳网站性能。其他MathWorks国家网站未优化您的位置。
联系您当地的办公室