 Cleve的角落:数学和计算上的Clyver
Cleve的角落:数学和计算上的Clyver Loren在Matlab的艺术上
Loren在Matlab的艺术上 史蒂夫在图像处理与matlab
史蒂夫在图像处理与matlab 人在仿真软件金宝app
人在仿真软件金宝app 深度学习
深度学习 开发区域
开发区域 Stuart的Matlab视频
Stuart的Matlab视频 在头条新闻后面
在头条新闻后面 本周的文件交换选择
本周的文件交换选择 汉斯在物联网
汉斯在物联网 学生休息室
学生休息室 初创公司、加速器和创业者
初创公司、加速器和创业者 Matlab社区
Matlab社区 MATLABユーザーコミュニティー
MATLABユーザーコミュニティー用系统辨识工具箱估计连续时间传递函数
今天Guest Blogger Pravallika描述了她如何使用新功能系统辨识工具箱为DC电机设计一个控制器
 任何控制工程师都知道设计一个好的控制器的关键是有一个好的设备模型。但如果你没有基本的方程怎么办?
任何控制工程师都知道设计一个好的控制器的关键是有一个好的设备模型。但如果你没有基本的方程怎么办?
在这种情况下,系统识别可以提供帮助。在R2012a,系统辨识工具箱添加了对估算金宝app模型类型的参数的支持,这些参数最直观,最容易用于控制工程师 - 连续时间传输功能。您可以指定要具有传递函数的杆和零,并且工具箱会自动确定POL的位置和零。如果您尝试模型的系统有延迟,则工具箱可以自动确定其值。
设置
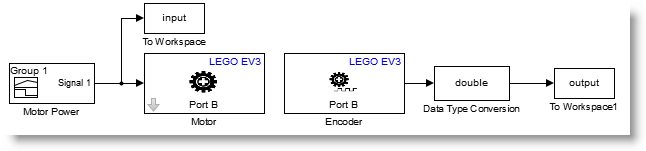
我一直在使用下面的图像中显示的设置。这很简单;它是一个连接到Arduino板的小型电机。

我向电动机施加电压并记录所得到的运动。我在matlab中导入了此数据构造一个iddata对象.

这是数据的样子,使用iddata情节命令。

估计
让我们从估计最简单的传递函数开始-一阶,不带零。为此,我们使用新函数t.

估计完成后,我们就可以比较输出的模型与测量的轴角。对比表明,该模型能很好地捕捉电机的动态特性。

验证
为了确保估计的传递函数表示电机动态,我们需要验证对独立数据集的传输功能。
我尝试通过识别的传递函数将实验获得的其他数据集进行馈入,并将结果与实测的轴角进行比较。即使拟合不是完美的,确定的传递函数在捕获系统动态方面做得很好。

使用估计传递函数
现在让我们使用识别的传输函数模型来设计PID控制器pidtune.

用系统识别工具箱获得的模型的一个值得注意的性质是,它们不仅包含关于“名义”参数值的信息,而且还携带关于参数不确定性的信息。我们可以检查一下效果参数不确定性对估计传递函数的伯德图大小。

我们也可以使用该功能回归为了对这个参数的不确定性进行采样,可以创建一个传递函数数组来测试我们的控制器。


上图显示了标称对象的闭环阶跃响应以及采样参数不确定度的附加10阶跃响应。可以看出,我们所设计的PID控制器在传递函数参数估计不确定的情况下工作良好。
估算其他模型类型
除估计连续时间传输功能外,系统识别工具箱还允许您估算连续时间状态空间模型和流程模型(特殊,低阶传输功能)。您可以快速比较不同的型号并选择最适合您问题的型号。
现在轮到你了
你如何开发工厂模型?尝试使用新功能以进行连续时间传输函数估计,让我们知道您通过离开我们的想法在这里评论.




评论
要发表评论,请点击在这里要登录您的MathWorks帐户或创建新的。