 克里夫的角落:克里夫硅藻土在数学和计算
克里夫的角落:克里夫硅藻土在数学和计算 MATLAB的博客
MATLAB的博客 史蒂夫与MATLAB图像处理
史蒂夫与MATLAB图像处理 人在仿真软件金宝app
人在仿真软件金宝app 人工智能
人工智能 开发区域
开发区域 斯图尔特的MATLAB视频
斯图尔特的MATLAB视频 在标题后面
在标题后面 文件交换的选择
文件交换的选择 汉斯在物联网
汉斯在物联网 学生休息室
学生休息室 MATLAB社区
MATLAB社区 MATLABユーザーコミュニティー
MATLABユーザーコミュニティー 创业、加速器,和企业家
创业、加速器,和企业家 自治系统
自治系统
SAE AutoDrive II - Y1 MathWorks模拟挑战冠军
在这个博客,Akshra将展示1圣和3理查德·道金斯地方赢家MathWorks模拟挑战奖SAE AutoDrive II第一年竞争,以及他们如何用MATLAB和Simulink仿真金宝app他们的系统模型。
介绍
SAE AutoDrive二世是一个四年制大学生设计大赛,10个团队从U。年代和加拿大参与。高级技术的竞争目标是在城市驾驶课程在一个自动驾驶模式所描述的SAE四级。每年MathWorks挑战团队使用模拟通过MathWorks模拟挑战年终报告。
模拟在一个重要的工具在你的系统开发工具包。自动驾驶系统,测试融合、规划和控制算法需要使用大量的测试场景。这些测试场景的范围可以从一个直路测试优势情况下测试自动紧急制动算法。模拟提供了一个安全的、健壮的环境设计,测试和验证您的系统。
这个博客将简要介绍2022年挑战第一和第三位获奖者(多伦多大学和俄亥俄州立大学),他们的系统设计,以及他们如何使用MathWorks工具来帮助实现整体竞争目标。团队被认为根据他们使用的工具在仿真执行以下任务:
- 模拟路径后
- 模拟交通信号和标志的交互
- 模拟避碰
- 测试与仿真生成的代码
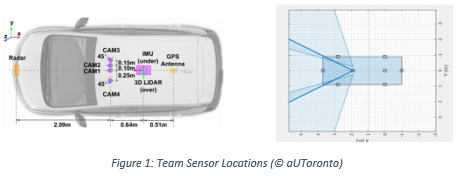
多伦多大学(aUTornoto)
的aUToronto赢得第一名在AutoDrive II Y1 MathWorks模拟挑战。
系统需求和指标
团队开始定义他们的高级功能系统需求和基线场景来测试它们。
- 系统生成并遵循路径点,导致一个给定的目标位置
- 光系统应当遵守交通标志和规则
- 系统应避免在路上的障碍
这些需求被分为规划和控制的要求。其中包括:
- 规划师应当马克占领所有的细胞都含有障碍,避免他们
- 规划师应当指定零速度在任何停车标志和红灯
- 控制器应生成速度剖面和指挥车扭矩来实现它
一旦系统需求和测试,团队必须定义度量,将整个场景进行绩效评估。表1总结了这些指标。这些指标被映射到路径的三个任务后,灯和交互迹象,避障。加速度和混蛋指标也被认为是为了量化乘客舒适性能。

表1
:系统指标(
©
aUToronto)
软件架构
团队的软件体系结构有两个主要特点:
- 模块化,模型和函数分别开发和使用仿真软件连接子系统与子系统/参考。金宝app当你添加一个蒙面库块或一个子系统块从图书馆到仿真软件模型,创建一个引用的实例库块。金宝app这样的引用实例库块包含父库链接或路径。链路或路径允许连接块更新库块时更新。
- 基于模型的设计流程,这个流程始于V图(图1),其中包含需求、设计、实现、集成和测试。系统级、子系统级的设计、实现和单元测试的成功实现基于模型的设计流程。

图1
基于模型的设计流程:V图
团队的系统分成模拟器,规划和控制模块。图2显示了连接仿真软件模块三个模块。金宝app

图2
:高级代码架构模型(金宝app
©
aUToronto)
模拟器模块车辆动力学模型和场景生成和输出车辆状态和道路演员。规划模块计算最优全局路线和本地路径点,和输出参考路径点。控制模块预处理这些路标点和执行反馈控制,和输出执行机构的命令
规划模块
团队评估5个不同规划算法在最优加权的标准解决方案,动态可行性,处理时间和避碰。普矩阵构造(图3),以选择一个全球航线计划和当地的路标规划。得分最高的A *算法路径最优,因此被选为全球计划。混合A *算法上分路径平滑,因此被选为当地的计划。

图3
规划师:普矩阵(
©
aUToronto)
控制模块
团队评估6在加权扰动抑制的标准算法,跟踪误差,约束执法,和计算时间。2普为了创建矩阵选择横向和纵向控制器。模型预测控制器的选择。首先,坐标系变换到当地的惯性和车身固定帧进行,然后路径重新取样做插入规划路径。速度调度是为了创建一个平滑路径规划速度剖面。货币政策委员会通过PI控制器的输出是美联储拒绝模型不匹配错误。最后前馈执行机构执行映射。这些流程如图4所示。

图4
:控制设计(
©
aUToronto)
仿真结果
团队测试系统在3场景——路标,避障,信号和信号交互。在仿真软件仿真结果的帮助下ROS2桥梁。金宝app表现情节是为所有生成(图5)和仿真得到的见解。
路标后——速度和横向位置误差满足要求。然而,状态误差性能被交易了为了满足团队传动质量指标。
避障的最小距离障碍超过需求。然而,地平线长度不得不被交易掉,以减少计算成本。
信号和标志,车辆能够超过最大停车距离要求。然而,计划和控制层必须增加到满足制动距离的要求。

图5
:仿真性能图(
©
aUToronto)
挑战和解决方案金宝搏官方网站
团队面临着一些挑战。这些挑战之一是planner-control同步问题。主要原因是ROS2异步通信问题,算法的延迟,锚点之间的距离。团队解决了这个通过构建一个路标重新取样,可以根据需要插入/扩展路径,保证控制的可行性。另一个挑战是规划师的可行性路径,同时降低计算速度场景涉及到角落。团队扩大他们的错误处理和暂停功能来处理这个问题。
俄亥俄州立大学七叶树AutoDrive)
的七叶树AutoDrive团队赢得第三名AutoDrive II Y1模拟挑战。
系统架构
团队开发的仿真软件模型,执行控制、路径金宝app规划、感知和决策任务。路径规划速度反馈控制器的输入和输出路径信息。控制器和感知决策逻辑块的信息,和输出转矩,刹车,车辆动态块和控制命令,然后自我车辆信息发送到地面实况的场景。

图6
:整个系统(
©
七叶树AutoDrive)
路标后使用控制器
路标的团队执行任务后使用斯坦利为纵向和ACC控制器,斯坦利和纯追求横向控制(图7)。

图7
:路径跟踪控制器(
©
七叶树AutoDrive)
纵向斯坦利控制器的参考速度和当前自我车辆速度,和输出纵向加速和减速命令。这些输出转换为转矩和制动命令发送给车辆动态块。
外侧斯坦利和纯粹的追求控制器输出控制命令的车辆动力方向盘角块。偏航率等参数反馈增益,操舵角反馈增益,位置增益,超前距离,和车辆速度调整和设定的团队。图8比较横航向角块的选择控制器。

图8
:航向角块比较(©七叶树AutoDrive)
信号和信号的交互
团队融合雷达和摄像头传感器数据使用多对象追踪块。决策仿真软件模型包含Stateflow逻金宝app辑使避碰决策和紧急状态在必要时进行干预。避碰的逻辑如下:如果一个对象检测与X m, ACC的模式切换。如果一个技术故障检测,车辆o紧急状态,如果一个对象被发现在x m,刹车直接访问。图9显示了多个场景导航逻辑。国家选择基于场景id。

图9
:导航逻辑(©七叶树AutoDrive)
避碰
自适应巡航控制系统(ACC)开启当对象被发现在25米的自我。ACC默认间距等参数预测地平线,加速度范围,样品时间,最大速度设置,时间差距是修改基于检测到的场景。图10显示了ACC系统。

图10
:ACC系统(©七叶树AutoDrive)
图11显示了铅和自我车辆速度,和相对安全的距离时间间隔设置为1时的结果。自我车辆从未超过设定速度。

图11
:避碰效果(©七叶树AutoDrive)
自动代码生成和安全完整性测试
团队使用嵌入式编码生成的代码。可以找到更多信息嵌入的编码器在这里。的金宝app仿真软件覆盖应用程序是用于可视化模型覆盖状态,链接要求,并创建测试用例。这学生休息室的博客展示如何编写和链接要求块,并使用测试用例验证和验证这些需求。总体平均和最大CPU利用率等指标和平均和最大执行时间进行评估。系统通过了所有的团队执行时间和代码覆盖率。
执行的团队还Model-in-the-loop (MIL)和Software-in-the-loop (SIL)他们的系统。MIL和硅结果相比使用硅/公益诉讼程序经理。银/公益诉讼经理是一个应用程序,它提供了一个简化的工作流程验证生成的代码。第一次模拟模型在正常模式下,然后在SIL模式。两个比较的结果。他们是几乎相同的。图12显示了这些结果在模型数据检查员。金宝app

图12
:MIL和硅比较结果(©七叶树AutoDrive)
挑战和解决方案金宝搏官方网站
团队面临一些挑战,主要是在代码生成。他们注意到不同子系统之间的采样时间不匹配,使用过渡块为了得到一个穿制服的采样率固定这个问题。团队还更换了他们的开关与饱和块块解决不匹配的速度和方向输入他们的控制器。低速度值是导致模拟慢下来。研究小组把0.001 m / s的速度下限来解决这个问题。
结论
总之,赢得团队的AutoDrive II Y1 MathWorks模拟挑战用MATLAB和Simulink设计,测试和验证他们的计划和控制系统。金宝app多伦多大学的团队执行自动化测试的系统级需求,并使用普矩阵评估多个规划者和控制器。美国俄亥俄州立大学的团队使用Stateflow切换操作模式之间进行导航,并比较系统性能在银和MIL。
- 类别:
- 汽车、
- MATLAB,
- 金宝app仿真软件,
- 团队的成就






评论
留下你的评论,请点击在这里MathWorks账户登录或创建一个新的。