开始计算机视觉工具箱
设计和测试计算机视觉、3D视觉和视频处理系统
计算机视觉工具箱™提供算法、功能和应用程序,用于设计和测试计算机视觉、3D视觉和视频处理系统。您可以执行目标检测和跟踪,以及特征检测、提取和匹配。您可以为单个、立体声和鱼眼相机自动校准工作流程。对于3D视觉,工具箱支持视觉和点云SLAM、立体视觉、金宝app运动结构和点云处理。计算机视觉应用程序自动化地面真相标记和相机校准工作流程。
您可以使用深度学习和机器学习算法(如YOLO v2、SSD和ACF)训练自定义对象检测器。对于语义和实例分割,可以使用U-Net和Mask R-CNN等深度学习算法。工具箱提供对象检测和分割算法,用于分析过大而无法放入内存的图像。预训练的模型可以让你检测人脸、行人和其他常见物体。
你可以通过在多核处理器和gpu上运行算法来加速算法。工具箱算法支持C/ c++代码生成,用金宝app于与现有代码、桌面原型和嵌入式视觉系统部署集成。
安装与配置
教程
- 什么是相机校准?
估计图像或摄像机的镜头和图像传感器的参数。
- 选择一个应用程序来标记地面真相数据
决定使用哪个应用程序来标记地面真相数据:图片标志,贴标签机视频,地面真相标签,激光雷达贴标签机,或信号贴标签机.
- 选择一个对象检测器
物体检测器的比较
- 选择基于传感器数据的SLAM工作流
选择正确的同步本地化和映射(SLAM)工作流,并找到主题、示例和支持的特性。金宝app
- 开始使用深度学习进行对象检测
利用深度学习神经网络进行目标检测。
- 开始使用深度学习进行语义分割
使用深度学习按类分割对象。
- 使用深度学习的点云入门
了解如何使用点云进行深度学习。
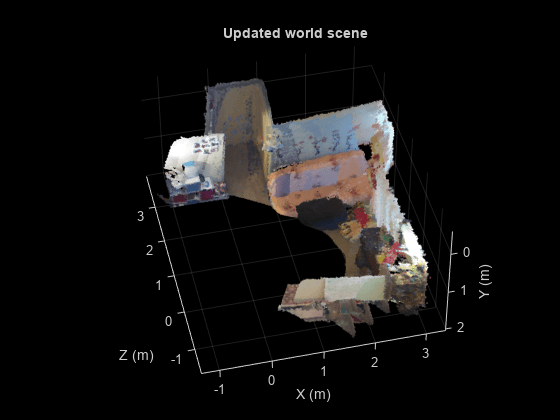
- 在MATLAB中实现点云SLAM
了解点云配准和映射工作流程。
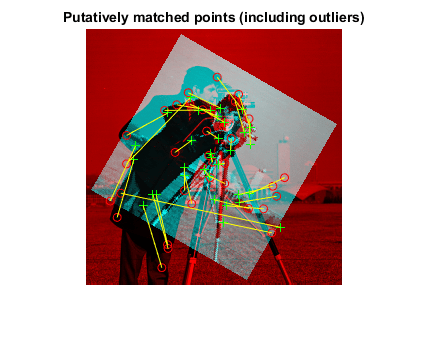
- 局部特征检测与提取
学习局部特征检测和提取的优点和应用。
特色的例子



视频

计算机视觉工具箱应用
设计和测试计算机视觉、3d视觉和视频处理系统

语义分割
通过使用SegNet, FCN, U-Net和DeepLab v3+等网络对单个像素和体素进行分类,分割图像和3D卷
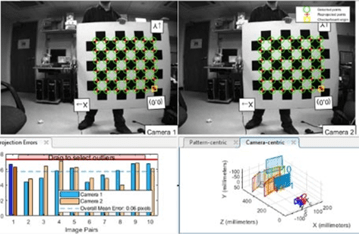
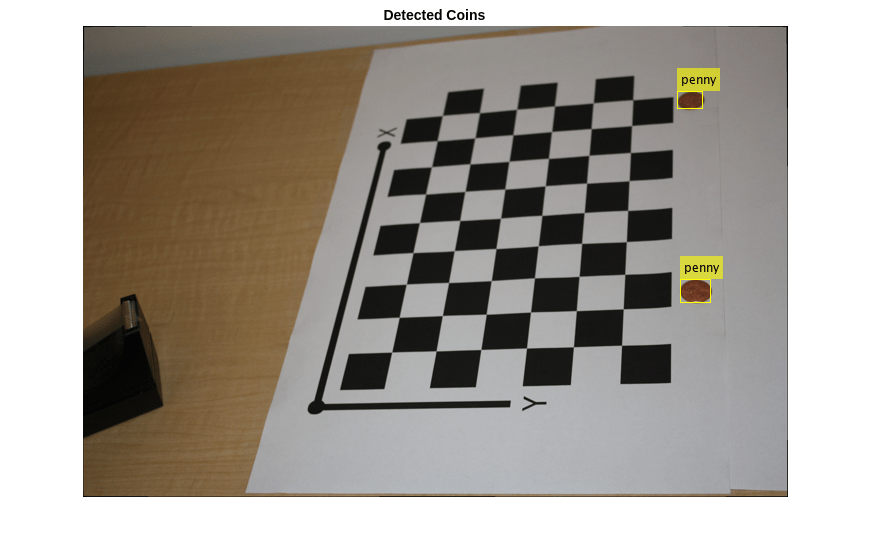
MATLAB相机标定
自动棋盘检测和校准针孔和鱼眼相机使用相机校准器应用程序
您也可以从以下列表中选择一个网站: