文档帮助中心文档
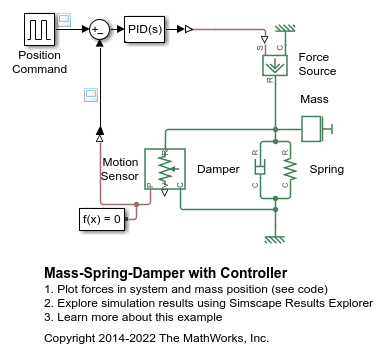
控制质量弹簧阻尼器。控制器调整质量上的力,使其位置跟踪命令信号。物体的初速度是10m / s。控制器调整力源施加的力来跟踪输入信号的步进变化。
两个质量弹簧阻尼器模型,一个使用Simulink®输入/输出块,一个使用Simscape™物金宝app理网络。
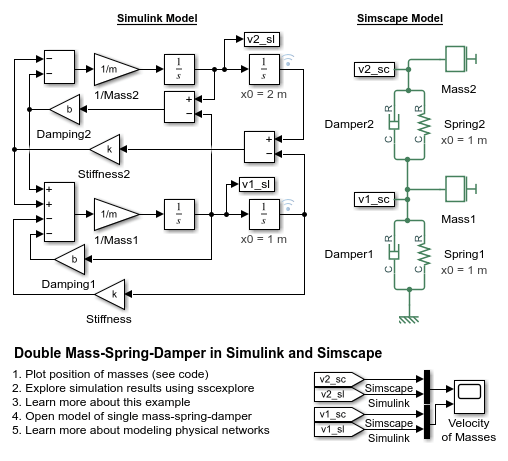
两个双质量弹簧阻尼器模型,一个使用Simulink®输入/输出块,一个使用Simscape™物理网络。金宝app
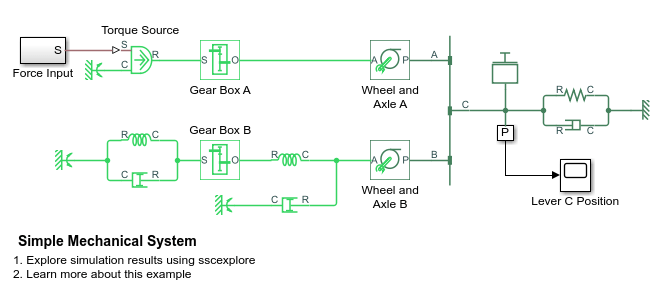
连接旋转运动和平移运动的系统模型。累加杆驱动由质量、粘性摩擦和连接到其关节c的弹簧组成的负载,关节B悬挂在通过轮轴和齿轮箱连接到参考点的两个旋转弹簧上。关节A通过齿轮箱和轮轴机构连接到扭矩源。
附在弹簧和粘性阻尼器上的质量。质量由理想速度源通过摩擦元件驱动。源的运动轮廓是这样选择的,即绘制质量的位移与源提供的位移的关系,从而产生典型的滞后曲线。
两个由硬挡板连接的物体。质量1由理想速度源驱动。随着速度输入方向的改变,质量2将保持静止,直到质量1到达平移硬停止所模拟的间隙的另一端。画出质量2的位移与质量1的位移之比,会产生典型的滞回曲线。
具有粘滑摩擦的机械旋转系统。惯量通过弹簧和阻尼器连接到一个定点上。惯性由速度源通过粘滑摩擦元件驱动。摩擦元件在分离摩擦和库仑摩擦之间存在差异,导致惯性的粘滑运动。
在链接机制中使用Simscape™杠杆块。杠杆1和杠杆4是第一类杠杆,支点在末端。杠杆3是第二类杠杆,支点在中间。杠杆2是由第一和第三杠杆驱动的求和杠杆。
你点击了一个对应于这个MATLAB命令的链接:
在MATLAB命令窗口中输入该命令来运行该命令。Web浏览器不支持MATLAB命令。金宝app
选择一个网站,在可用的地方获得翻译的内容,并查看当地的活动和优惠。根据您所在的位置,我们建议您选择:.
您也可以从以下列表中选择一个网站:
选择中国站点(中文或英文)以获得最佳站点性能。其他MathWorks国家站点没有针对您所在位置的访问进行优化。
联系当地办事处