文档帮助中心文档
使用这些例子来学习如何控制电机,比较它们的特性和开发电动执行器。
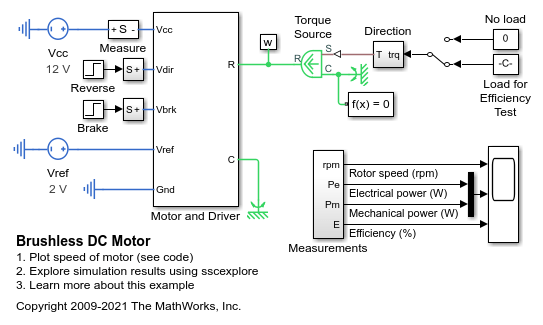
如何基于数据表信息构建和参数化无刷直流电机(即伺服电机)的系统级模型。电机和驱动器被建模为一个单独的屏蔽子系统。如果在Simulink®中查看模型,选择电机和驱金宝app动器块,并输入Ctrl+U查看掩模下的模型结构。
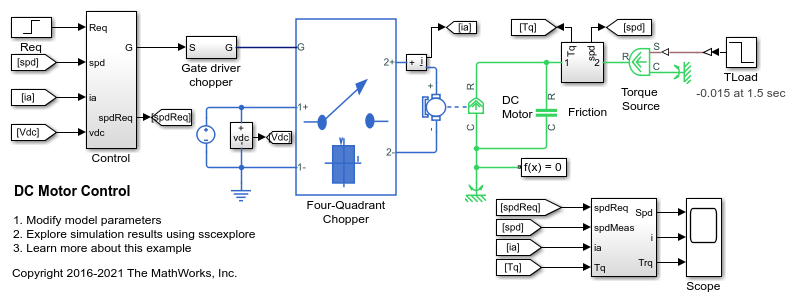
一种用于直流电机的串级调速结构。采用PWM控制的四象限斩波器馈电直流电机。控制子系统包括外部速度控制环、内部电流控制环和PWM产生。总仿真时间(t)为4秒。在t = 1.5秒时,负载转矩增大。在t = 2.5秒时,参考速度从1000 rpm变为2000 rpm。
一种用于直流电机的超前滞后速度控制结构。采用PWM控制的四象限斩波器馈电直流电机。控制子系统包括超前滞后控制器、恒增益和PWM产生。总仿真时间(t)为4秒。在t = 1.5秒时,负载转矩增大。在t = 2.5秒时,参考速度从1000 rpm变为2000 rpm。
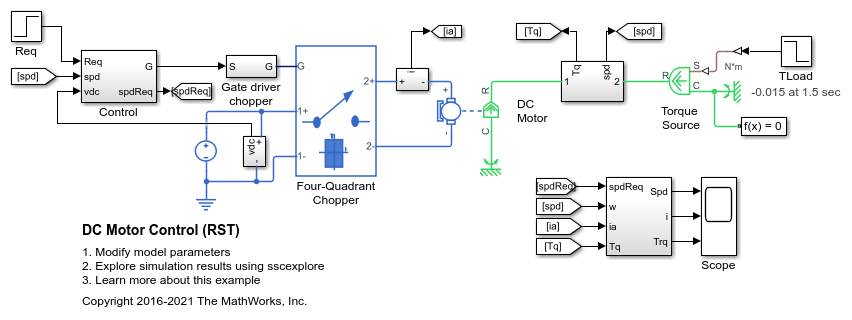
用于直流电动机的RST速度控制结构。采用PWM控制的四象限斩波器馈电直流电机。控制子系统包括具有30的控制地平线的RST控制器和PWM生成。传感器测量的转子转速的延迟为5ms。总仿真时间(t)为4秒。在t = 1.5秒时,负载转矩增大。在t = 2.5秒时,参考速度从1000 rpm变为2000 rpm。
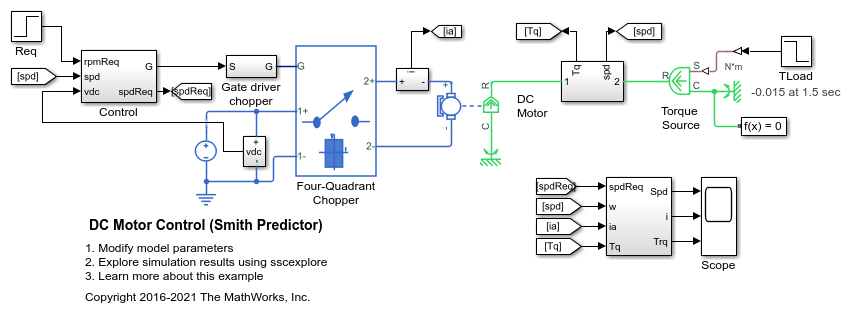
一种用于直流电机的Smith Predictor速度控制结构。采用PWM控制的四象限斩波器馈电直流电机。控制子系统包括Smith预估控制器和PWM产生。传感器测量的转子转速的延迟为5ms。总仿真时间(t)为4秒。在t = 1.5秒时,负载转矩增大。在t = 2.5秒时,参考速度从1000 rpm变为2000 rpm。
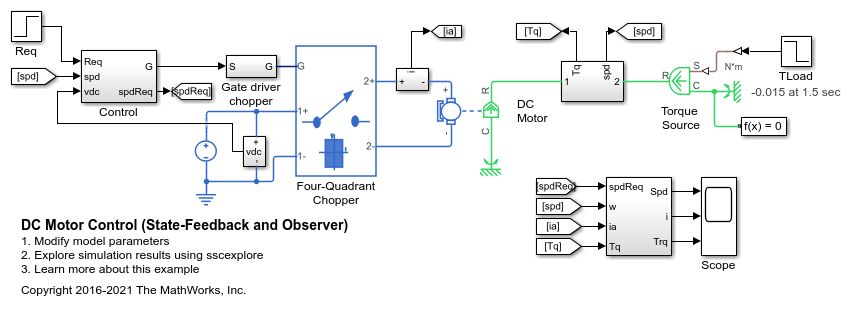
一种直流电机的状态反馈速度控制结构。采用PWM控制的四象限斩波器馈电直流电机。控制子系统包括状态反馈控制回路和PWM产生。状态向量包括测量到的转子转速和通过观测器估计的直流电动机电流。利用系统的状态空间模型,采用极点配置的方法合成观测器和状态反馈控制器。总仿真时间(t)为4秒。在t = 1.5秒时,负载转矩增大。在t = 2.5秒时,参考速度从1000 rpm变为2000 rpm。
一种由直流电机、丝杠和压电堆串联而成的混合式执行器。直流电机和丝杠组合支持大位移(几十毫米),但在跟踪参考需求x_ref时动态缓慢。金宝app相反,压电堆只支持+-0.1mm的最大位移,但具有非常快的动态响应。金宝app结合这两种致动器技术,创造了具有高度精确定位的大行程致动器。
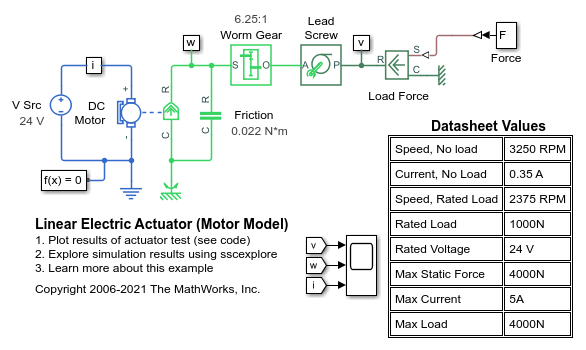
如何使用数据表参数值开发不受控制的线性执行器的模型。致动器由DC电动机驱动A 6.25:1蜗轮组成,该蜗轮又驱动3mm铅螺钉以产生线性运动。用于致动器的制造商数据定义了无负载线性速度(26mm / s),额定负载(1000n),额定负载线性速度(19mm / s)和最大电流(5a)。最大静力为4000n,额定电压为24V DC。
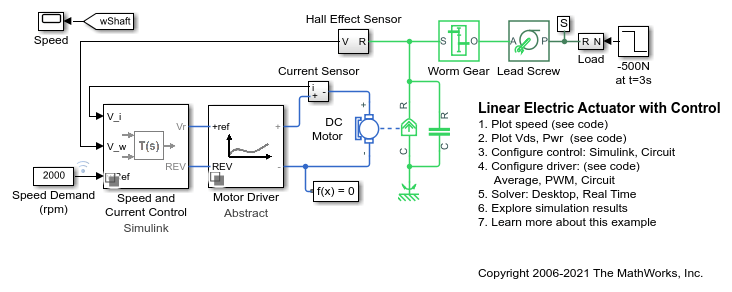
受控线性执行器的详细实现模型。执行机构由直流电机驱动蜗轮蜗杆,蜗轮蜗杆带动丝杠产生直线运动。该模型包括霍尔效应传感器的量子化效应和模拟电子学中控制的实现。在这个模型中有多个不同的子系统,它们具有不同保真度的模型。
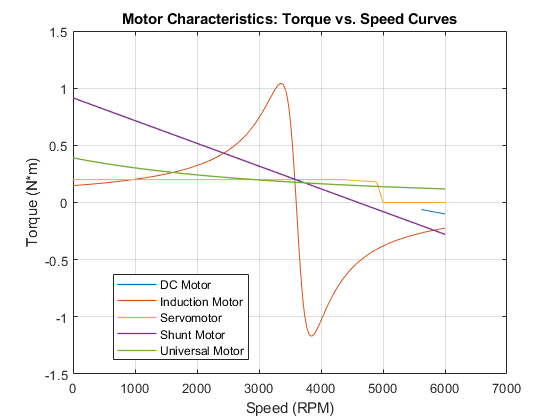
五种不同电机类型的扭矩特性比较。要选择电机类型,请右键单击电动机块,选择变体 - >覆盖使用,然后选择所需电机。所有电机都尺寸大致相同的机械额定值。
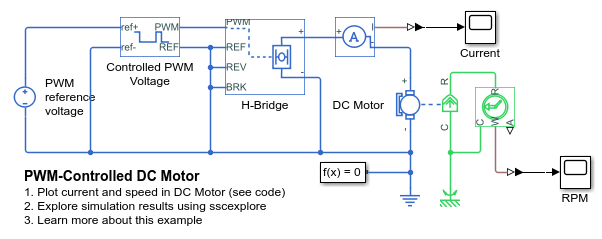
如何使用受控的PWM电压和H桥块来控制电机。直流电机块采用制造商数据表参数,该参数指定电机,通过从12V直流电源运行时,在2500转/分钟和空载速度下提供10W机械电源,无负载速度为4000rpm。因此,如果PWM参考电压设定为最大值+ 5V,则电机应以4000rpm运行。如果它设置为+ 2.5V,那么它应该以大约2000 rpm运行。模拟模型参数设置为对受控PWM电压和H桥块的平均,从而快速仿真。要验证平均行为,请将模拟模式参数更改为两个块中的PWM。
步进电机在步进和平均仿真模式下模拟。对于不会导致滑动的任何负载,平均模式的目的更快。为了避免对结果的不正确解释,步进电机具有近似检测滑动,这可以设置为产生警告或错误。
如何使用步进电机驱动器和步进电机块一起实现一个可控的永磁步进电机。该模型提供两个控制器选项:一个控制位置和一个控制速度。要更改控制器类型,右键单击controller块,选择Variant->Override using->,并选择Position或Speed。
在步进和平均仿真模式下模拟的单极步进电机。对于不会导致滑动的任何负载,平均模式的目的更快。为了避免对结果的不正确解释,步进电机具有近似检测滑动,这可以设置为产生警告或错误。
如何使用单极步进电机驱动器和单极步进电机块一起实现一个可控的永磁步进电机。该模型提供两个控制器选项:一个控制位置和一个控制速度。要更改控制器类型,右键单击controller块,选择Variant->Override using->,并选择Position或Speed。
你点击一个链接对应于这个MATLAB命令:
通过在MATLAB命令窗口中输入命令来运行命令。Web浏览器不支持MATLAB命令。金宝app
选择一个网站,以便在可用的地方进行翻译内容,并查看本地活动和优惠。根据您的位置,我们建议您选择:。
您还可以从以下列表中选择一个网站:
选择中国网站(以中文或英文)以获得最佳网站性能。其他MathWorks国家网站未优化您所在地的访问。
联系您当地的办公室