主要内容
このページの翻訳は最新ではありません。ここをクリックして,英語の最新版を参照してください。
大满贯
2次元および3次元の位置推定とマッピングの同時実行
大满贯(位置推定とマッピングの同時実行)は,マッピングと位置推定と姿勢推定のアルゴリズムの両方を使用して,マップを作成すると同時にそのマップ内における車両の位置を推定します。激光雷达スキャンとオドメトリ姿勢推定を処理する独自の大满贯アルゴリズムを調整し,対話的にマップを作成するには,lidarSLAMを使用します。ログに記録されフィルター処理されたデータを受け取り,大满贯を使用してマップを作成するにはbuildMapを使用します。大满贯マップビルダーアプリでは,相対姿勢の変更とスキャンの調整を手動で行ってマップの精度を向上できます。
アプリ
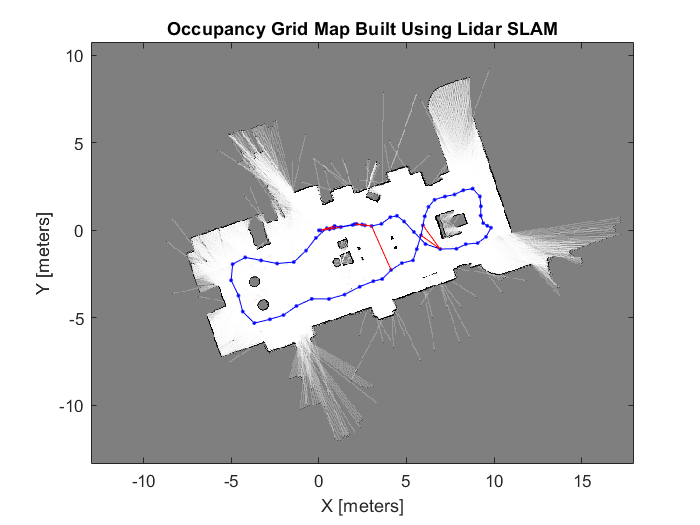
| 大满贯マップビルダー | 使用基于激光雷达的SLAM构建二维网格地图 |
オブジェクト
lidarSLAM |
激光雷达スキャンを使用した位置推定とマッピングの実行 |
関数
addScan |
激光雷达大满贯マップへのスキャンの追加 |
buildMap |
根据激光雷达扫描建立占用地图 |
removeLoopClosures |
从姿势图中移除循环闭包 |
scansAndPoses |
提取扫描和相应的姿态 |
显示 |
图像扫描和机器人姿势 |
注目の例



你也可以从以下列表中选择一个网站:
