文件交换
MATLAB和Simu金宝applink工具车辆运动学、可视化和传感器模拟。
并串联混合动力汽车的模型与系统级和电气系统的详细的变体。
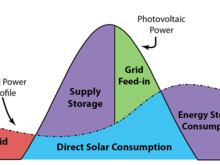
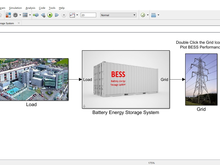
在线优化能量储存的行为在一个微型智能电网"给定系统约束和定价
风力涡轮机模型包括叶片、发动机舱,俯仰和偏航驱动,发电机和控制系统。
哈迪saddat matlab工具箱
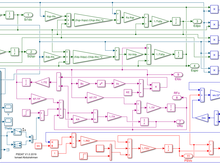
SimPowerSystems IEEE 39-bus系统的模型,称为十台新英格兰电力系统
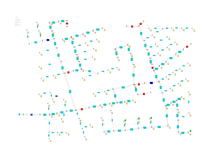
MATLAB-金宝appSimulink IEEE 33公交系统模型(Baran和吴,1989)
示例文件为MATLAB和Simulink仿真机器人领域步行金宝app机器人视频。
移动机器人训练库和仿真地图发生器应用培训视频系列。
四轴飞行器与多体、电和热模型遵循路径提供一个包。
在这个模型中,一个微型智能电网"基于14-busbar IEEE测试系统提出了配电系统。
贝丝通常用于负载均衡、调峰负荷转移应用程序等。
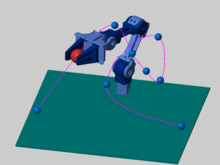
建模与仿真的MATLA金宝appB和Simulink文件ROBOTIS OpenManipulator
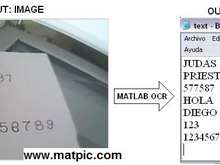
OCR的目的是将光学模式对应的字母数字或其他字符。
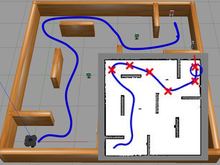
这个工具箱是一组虚拟环境仿真软件旨在帮助移动机器人的基本概念的教金宝app学
直流系统中性点加强VSC三个水平
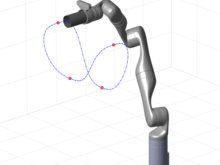
MATLAB和Simu金宝applink机器人的轨迹生成和评估实例。
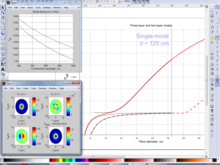
模拟光纤模式
与PSO混合可再生能源系统的技术经济分析
所有文件相关的学生竞争,移动机器人技术培训视频系列。
配套软件
SPS模拟优化模型通过使用一个聚合MMC。
这是背靠背直流模块化多级转换器操作作为电能质量调节系统提供无源网络。
这个提交包含一组模型显示的实现电动全地形车辆由无刷直流电机。
例子创建移动机器人自主导航软件栈,使用MATLAB和Simulink作出金宝app
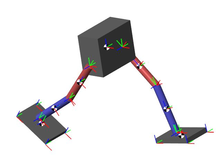
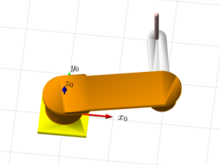
这个工具箱用于表示任何机器人的运动图使用固体三维框架和固体链接。
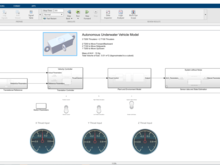
这个提交包含文件中使用这个视频在建模、仿真和控制的自主水下航行器
简单而直接的dh参数在MATLAB的实现。
机械臂转移两个传送带之间的部分
构建自动IEEE 123节点测试馈线和比较模拟基准测试结果
计算和可视化的逆运动学2-link机器人手臂的雅可比矩阵,并使机器人写你好。
构建欧洲LV IEEE 906总线自动测试馈线和比较基准测试结果
模拟一个电网能量存储系统上使用
设计、原型和测试您的无刷直流电机控制使用仿真软件和Speedgoat硬件金宝app
图书馆的功能促进光子集成电路GDS布局的设计
转发平面二自由度机器人机械手的动态连续时间函数输入τ的输入函数和离散时间τ
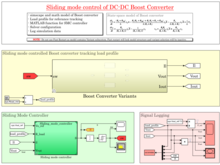
滑模控制器设计的数学模型和基于Simscape直流-直流转换器
机械手和移动机器人轨迹规划和执行机构的分析模型。
资源开始使用MATLAB仿真软件和机器人操作系统(ROS)。金宝app
电力系统状态估计和PMU(相量测量单元)使用WLS PMU
统一的模拟和分析平台软、刚性和混合机器人系统
模拟光镊的工具箱
模拟的机械手臂
与电驱动四足机器人模型,包括步态分析和设计工作流程。
电磁性能的多层基于RCWA(严格耦合波分析)
这个工具给你输出的反射率,吸收率,透射率是波长的函数。只允许正常的发病率。
这个包包含电力电子组件半实物模型与仿真软件测试金宝app®实时™。
这个功能块的工作空间平面n-DOF转动或移动DH参数和所有变量的约束。
三角洲三自由度机器人,建立工作区和多维数据集内
这个程序是三角洲的动画模拟程序的机器人。
这是一个3自由度机械手臂Simscape模型
单击并拖动看手臂回应。包括了良好的注释派生的代码。
RoboDK API允许您直接从Matlab模拟和程序机器人手臂的代码
MATLAB代码3自由度PID控制器的PUMA560机器人
这是一个3 d仿真彪马762机械手能够解决正向和逆向运动学。
3自由度正运动学ArmRobot模拟(GUI)模式MeArm使用Denavit-Hartenberg公约
一个开源Simulink-ba金宝appsed程序模拟电力系统与可再生能源集成
收集电路AMS模型使用模型和SimScape水平金宝app
在附呈的档案中你会发现这个图形用户界面(MATLAB GUI)正向和逆向运动学的多自由度机械臂。
可视化的直导线中的电流引起的电磁场。
选择一个网站
选择一个网站翻译内容,看到当地事件和提供。根据你的位置,我们建议您选择:。
你也可以从下面的列表中选择一个网站:
选择中国网站(中文或英文)最佳站点的性能。其他MathWorks国家网站不优化的访问你的位置。
联系你当地的办公室