植物参数的多值调谐
这个例子展示了如何使用控制系统调谐器当电站中的参数发生变化时,对控制系统进行调整。在这个例子中使用的控制系统是一个四分之一汽车模型的主动悬架。本例使用控制系统调谐器当电厂的参数与标称值不同时,调整系统以满足性能目标。
四分之一车模型和主动悬架控制
一个简单的四分之一车模型的主动悬架系统如图1所示。四分之一车模型由两个质量组成,一个汽车底盘与质量 和车轮组装的质量
和车轮组装的质量 .有一个弹簧
.有一个弹簧 和阻尼器
和阻尼器 在质量之间,它模拟了被动弹簧和减震器。车轮总成和路面之间的轮胎是用弹簧建模的
在质量之间,它模拟了被动弹簧和减震器。车轮总成和路面之间的轮胎是用弹簧建模的 .
.
主动悬架引入了一个力 在底盘和车轮装配之间,并允许设计师平衡驾驶目标,如乘客舒适度和道路处理与反馈控制器的使用。
在底盘和车轮装配之间,并允许设计师平衡驾驶目标,如乘客舒适度和道路处理与反馈控制器的使用。
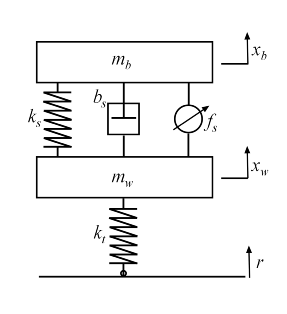
图1:主动悬架的四分之一车模型。
控制体系结构
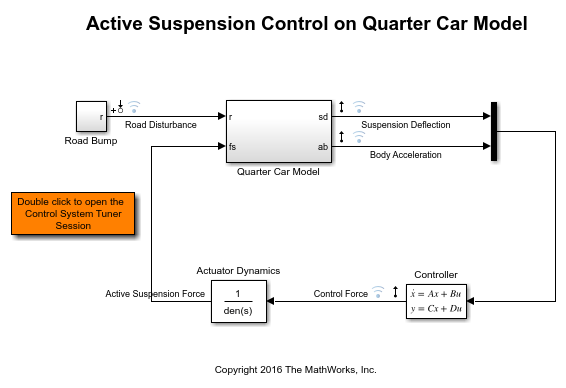
四分之一车模型是用Simscape实现的。下面的Simulink模型包金宝app含了带有主动悬架、控制器和执行器动力学的四分之一车模型。它的输入是道路扰动和主动悬架力。它的输出是悬架挠度和车身加速度。控制器使用这些测量数据向执行器发送控制信号,从而产生主动悬架的力。
mdl =“rct_suspension.slx”;open_system (mdl)
控制目标
这个例子有以下三个控制目标:
良好的处理能力,从道路干扰到悬挂偏转。
用户舒适度定义从道路干扰到身体加速。
合理控制带宽。
弹簧常数的标称值和阻尼器车身和车轮之间的装配是不精确的,由于材料中的缺陷,这些值可以是恒定的,但不同。使用各种参数值评估对系统控制的影响。
模拟7厘米量级的道路扰动,并使用恒定的重量。
Wroad = ss (0.07);
定义从道路干扰到悬架偏转的闭环目标为
HandlingTarget = 0.044444 * tf([1/8 1],[1/80 1]);
定义从道路干扰到身体加速的舒适度目标。
ComfortTarget = 0.6667 * tf([1/0.45 1],[1/150 1]);
利用从道路干扰到控制信号的权函数来限制控制带宽。
Wact = tf(0.1684*[1 500],[1 50]);
有关选择闭环目标和权函数的更多信息,请参见主动悬架的鲁棒控制(鲁棒控制工具箱).
控制器调优
打开一个控制系统调谐器session用于主动悬挂控制,在Simulink模型中,双击橙色块。金宝app将调优块设置为二阶控制器,并定义三个调优目标来实现上述的处理、舒适和控制带宽。为了观察调谐的性能,绘制了从道路扰动到悬架挠度、车身加速度和控制力的阶跃响应曲线。
处理、舒适和控制带宽目标被定义为增益限制,HandlingTarget / Wroad,ComfortTarget / Wroad和Wact / Wroad.所有增益函数都除以Wroad合并道路干扰。
采用零控制器的开环系统违反了操控目标,导致悬架偏转和车身加速度的高度振荡行为,且沉降时间长。
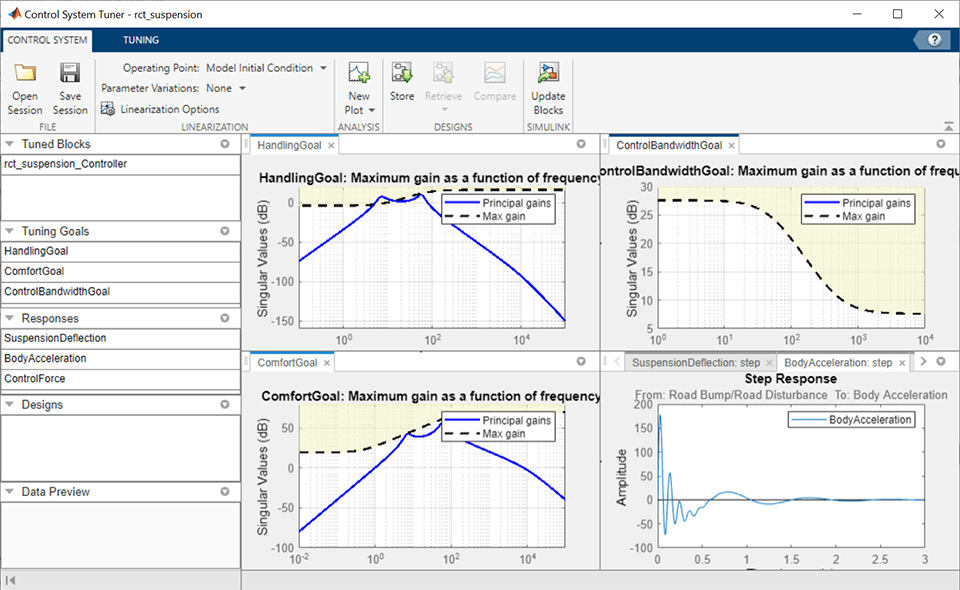
图2:带有会话文件的控制系统调谐器。
使用。来调整控制器控制系统调谐器,在调优选项卡上,单击调优.如图3所示,这种设计满足了调优目标,响应的振荡更小,并迅速收敛到零。
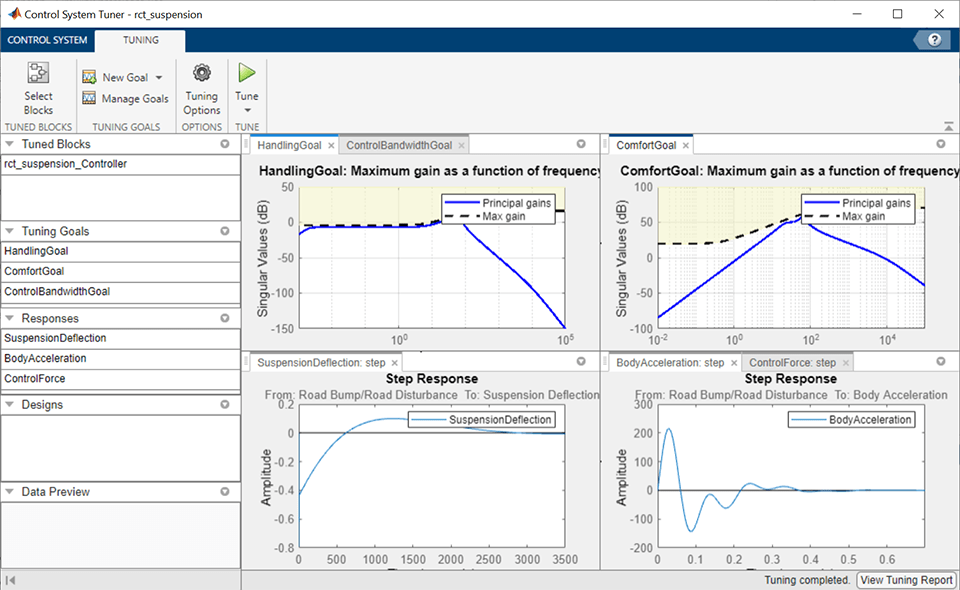
图3:调整后的控制系统调谐器。
控制器多参数值调优
现在,尝试为多个参数值调优控制器。汽车底盘质量的默认值是300公斤。根据不同的操作条件,将质量调整为100kg、200kg和300kg。
为了改变这些参数控制系统调谐器,在控制系统选项卡,在参数的变化中,选择选择要更改的参数.在打开的对话框中定义参数。
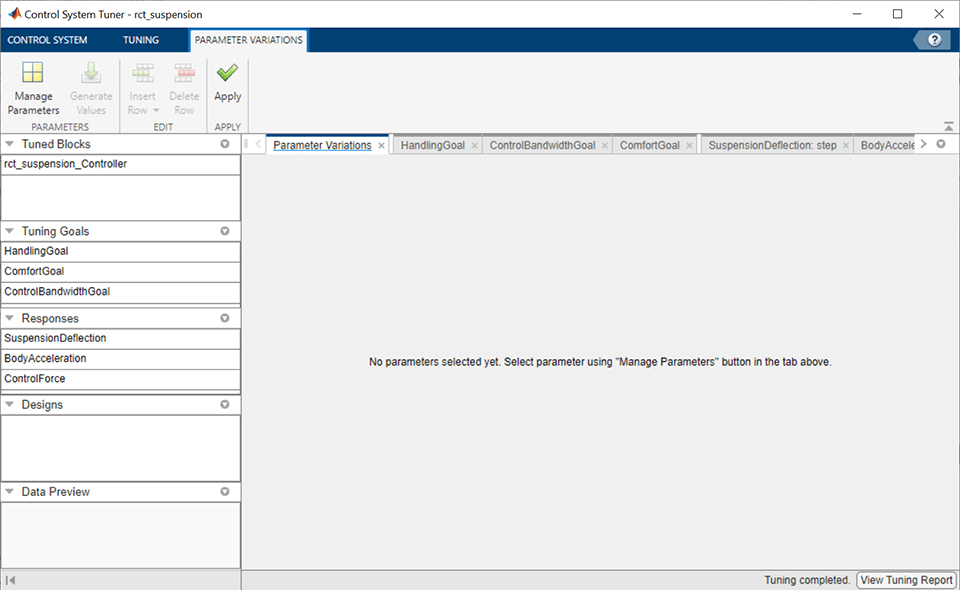
图4:定义参数变化。
在参数的变化选项卡上,单击管理参数.在“选择模型变量”对话框中选择Mb.
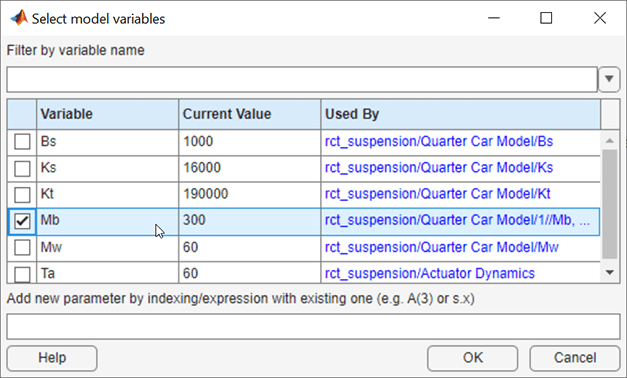
图5:选择一个参数来改变模型。
现在,参数Mb在参数变量表中以默认值添加。
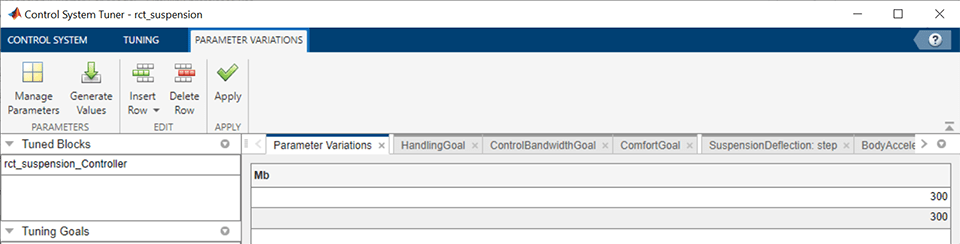
图6:带有默认值的参数变化表。
要快速生成变化,请单击生成值.在“生成参数值”对话框中,定义值100,200,300Mb,然后单击覆盖.
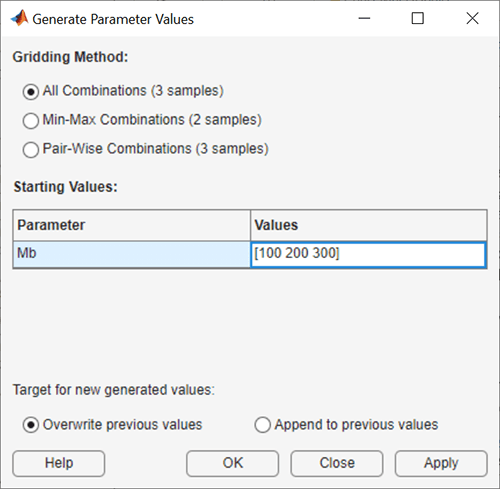
图7:生成值窗口。
所有值都被填充到参数变量表中。将参数变量设置为控制系统调谐器,点击应用.
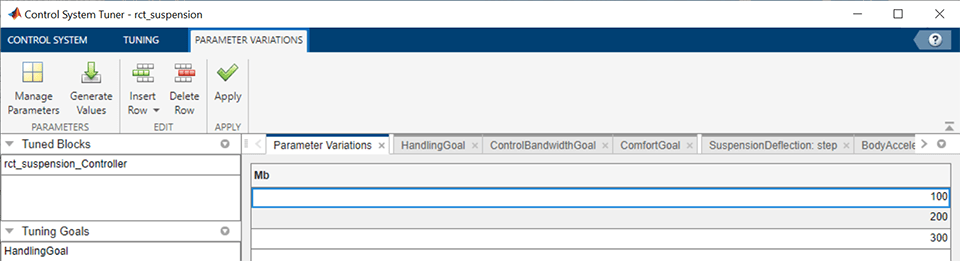
图8:带有更新值的参数变化表。
由于参数的变化,在调优目标图和响应图中出现了多条线。由这些标称参数值得到的控制器将导致闭环系统不稳定。
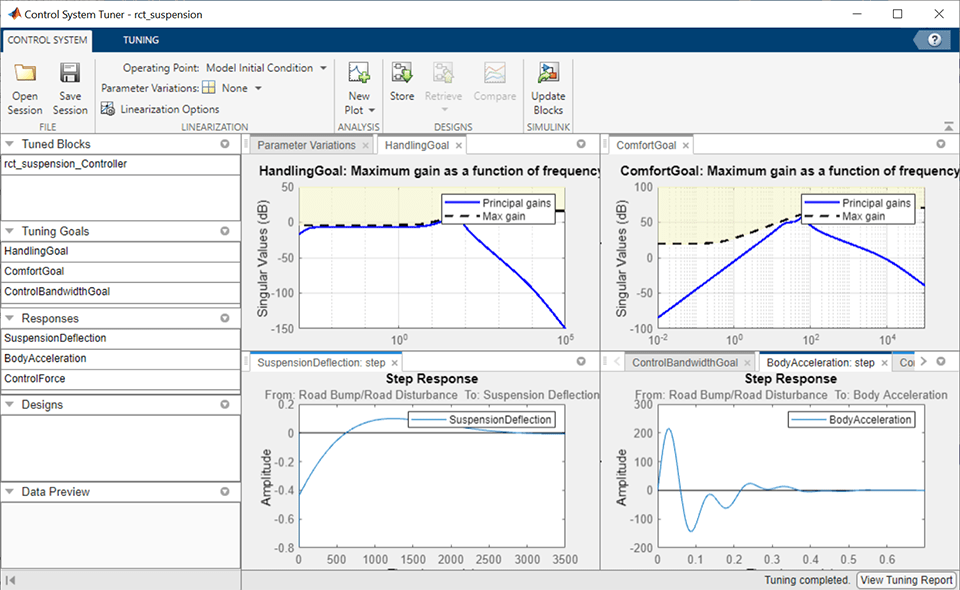
图9:具有多个参数变化的控制系统调谐器。
调整控制器,以满足处理,舒适和控制带宽目标点击调优在调优选项卡。调优算法试图满足标称参数和所有参数变化的这些目标。与图10所示的标称设计相比,这是一项具有挑战性的任务。
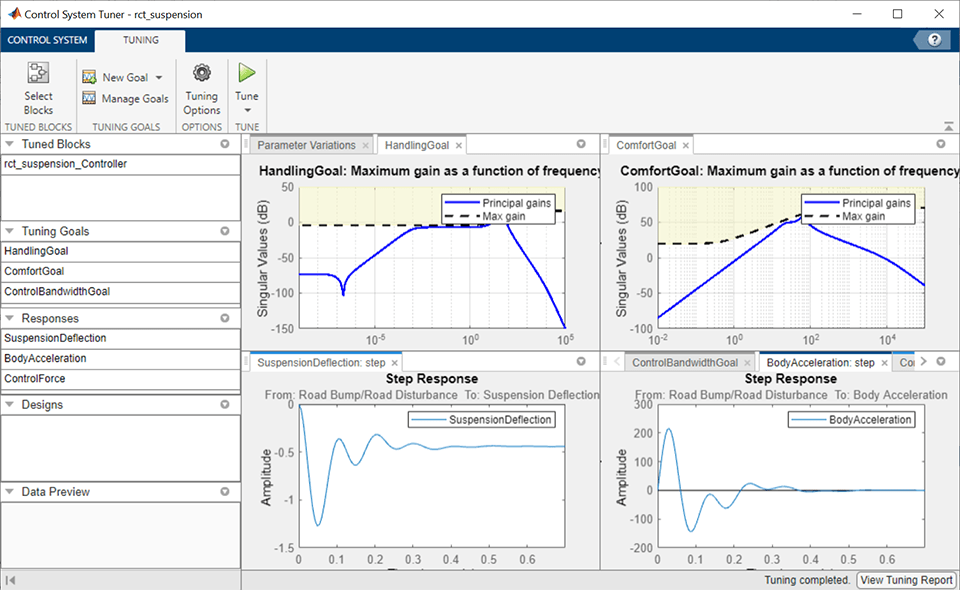
图10:具有多个参数变化的控制系统调谐器(调谐)。
控制系统调谐器为线性化控制系统调整控制器参数。要检查Simulink模型上已调优参数的性能,请单击以更新Simulink模型中的控制器金宝app更新模块在控制系统选项卡。
模拟每个参数变化的模型。然后,使用仿真数据检查器检查所有仿真的结果。结果如图11所示。对于所有三个参数的变化,控制器试图以最小的控制努力最小化悬架偏转和车身加速度。

图11:Simulink模型上的控制器性能。金宝app
另请参阅
相关的话题
你也可以从以下列表中选择一个网站:
