负载地面实况信号标签
的地面实况贴标签机应用程序提供了选项标签两种类型的信号。
图像信号基于图像的。你可以加载这些信号来源,如视频或图像序列。
点云的信号lidar-based。你可以加载这些信号来源等一系列的点云文件。
在本例中,您一个视频和一个点云序列加载到应用程序。这些信号来自相机传感器和激光雷达传感器安装到车辆。信号表示相同的驾驶场景。
加载时间戳
加载点云序列的时间戳。时间戳是持续时间向量序列相同的文件夹中。加载时间戳,你必须暂时将这个文件夹添加到MATLAB®搜索路径。
pcSeqFolder = fullfile (toolboxdir (“开车”),“drivingdata”,“lidarSequence”);目录(pcSeqFolder)负载timestamps.matrmpath (pcSeqFolder)
这个应用程序还提供一个选项来指定时间戳视频来源。在本例中使用的视频没有一个单独的时间戳文件,所以当你加载视频,你可以阅读时间戳直接从视频源。
打开地面实况贴标签机应用
打开地面实况贴标签机应用MATLAB命令提示符,输入这个命令。
groundTruthLabeler
应用程序打开一个空会话。
或者,您可以打开的应用程序应用程序选项卡,在汽车。
从数据源装载信号
的地面实况贴标签机应用程序使您能够从多种类型的数据加载信号来源。在应用中,数据源是一个文件或文件夹包含一个或多个信号标签。
的视频中,数据源是一个MP4文件,它包含一个视频。
对于点云序列,数据来源是一个文件夹,其中包含一个序列的点云数据(PCD)文件。在一起,这些文件代表一个点云序列。
其他数据源,如rosbags,可以包含多个信号,你可以加载。为更多的细节在源和信号之间的关系,知道了来源与信号地面真理标签。
加载视频
视频加载到应用程序。
在应用程序将来发布,点击进口>添加信号。
添加/删除信号对话框打开的源类型参数设置为
视频和时间戳参数设置为从文件。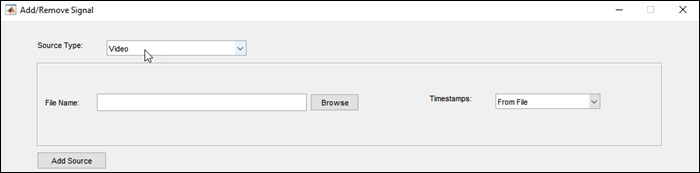
在文件名称参数,浏览视频文件。
< matlabroot >MATLAB安装文件夹的完整路径,返回的matlabroot函数。< matlabroot > \工具箱\ \ drivingdata \ 01 _city_c2s_fcw_10s.mp4开车
点击添加源。视频加载到应用程序,应用程序读取时间戳直接从视频。源表显示的视频数据信息来源。

加载点云序列
点云序列加载到应用程序。
添加/删除信号对话框仍然开放,视频加载设置源类型参数
点云序列。对话框显示新选项特定装载点云序列。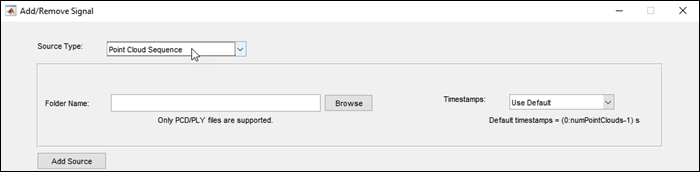
在文件夹名称参数,浏览
lidarSequence点云数据的文件夹,其中包含序列(PCD)文件加载。< matlabroot > \工具箱\ \ drivingdata \ lidarSequence开车
设置时间戳参数
从工作空间。在从工作区导入对话框,选择时间戳变量你加载点云序列。点击好吧。
点击添加源。点云序列加载到应用程序,这个应用程序读取的时间戳
时间戳变量。源表显示信息的数据源点云序列。


验证信息加载信号
桌子的底部添加/删除信号加载对话框信息信号。验证表显示这个信息加载信号。
的信号的名字列显示的信号生成的应用程序名称。视频中,信号的名字是数据源的文件名前缀
video_和没有文件扩展名。点云序列的信号叫源文件夹的名称。的源列显示的完整文件路径信号数据源。
的信号类型列显示每个信号的类型。类型的视频
图像。的点云序列类型点云。的时间范围列显示信号的持续时间基于时间戳数据加载。信号都是大约10秒长。
点云序列,如果你离开了时间戳设置为使用默认,那么时间范围序列的值范围从0到33秒。这个范围是基于34 PCD文件的文件夹。默认情况下,应用程序设置时间戳的点云序列持续时间向量的数量从0 - 1有效的点云文件。单位是秒。如果这个问题发生时,表中,选择为点云序列行复选框。然后,单击删除所选再次,负荷信号,再次验证信号信息。
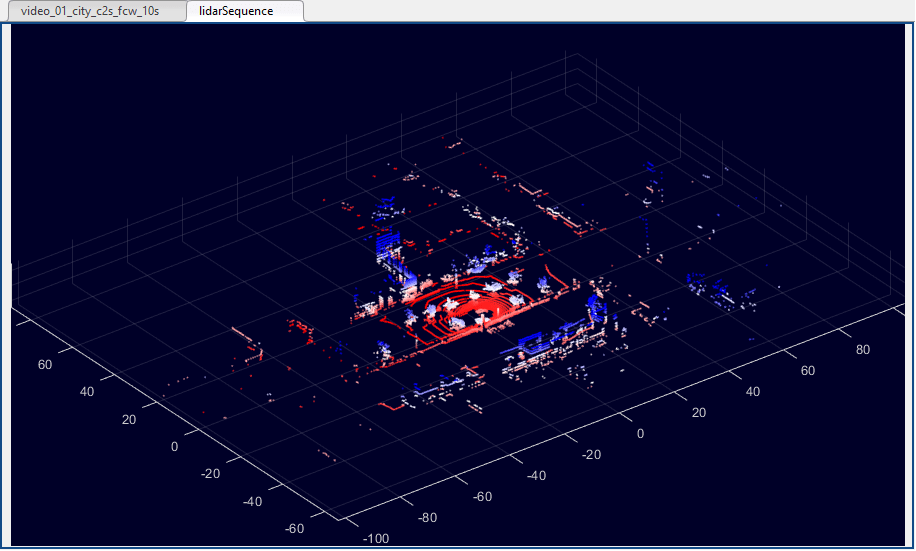
验证信号加载正确后,点击好吧。应用程序加载信号并打开第一帧的最后一个信号补充道,对于这个例子是点云序列。
配置信号显示
当你第一次加载信号,应用一次只显示一个信号。并排显示信号,首先,在标签标签的应用程序将来发布,点击显示网格。然后,将指针移到选择1×2网格并单击网格。
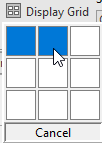
视频和点云序列并排显示。
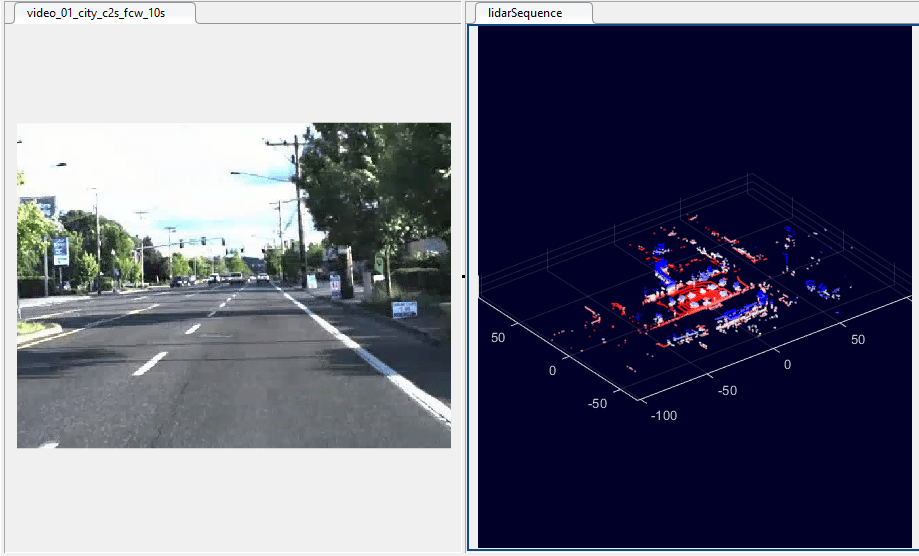
查看视频和点云序列,在下方的滑块信号,点击播放按钮![]() 。视频中更顺利点云序列由于视频帧在大约相同的时间,因此更高的帧速率。
。视频中更顺利点云序列由于视频帧在大约相同的时间,因此更高的帧速率。
默认情况下,应用程序中所有帧的帧率最高的信号。这个信号被称为主要的信号。对于所有其他信号,应用程序显示帧与当前time-aligned显示帧的主要信号。配置信号是主要的信号,使用播放控制的选项设置对话框。滑块下面打开这个对话框,单击时钟设置按钮![]() 。更多细节关于使用这些选项来控制显示的信号帧,明白了控制信号帧标签的回放。
。更多细节关于使用这些选项来控制显示的信号帧,明白了控制信号帧标签的回放。
加载信号和查看帧后,您现在可以创建标签定义和标签数据,所述标签地面实况为多个信号。