dsp。AffineProjectionFilter
使用仿射投影(AP)算法计算输出,误差和系数
描述
的dsp。AffineProjectionFilter系统对象™使用AP过滤器实现对输入的每个通道进行过滤。
过滤输入的每个通道:
创建
dsp。AffineProjectionFilter对象,并设置其属性。使用参数调用对象,就像调用函数一样。
要了解更多关于System对象如何工作的信息,请参见什么是系统对象?
创建
语法
属性
使用
描述
输入参数
输出参数
对象的功能
要使用对象函数,请指定System对象作为第一个输入参数。例如,释放名为system的对象的系统资源obj,使用下面的语法:
发行版(obj)
例子
正交相移编码自适应均衡
请注意:如果你正在使用R2016a或更早的版本,将每个对对象的调用替换为等价的一步语法。例如,obj (x)就变成了步骤(obj, x).
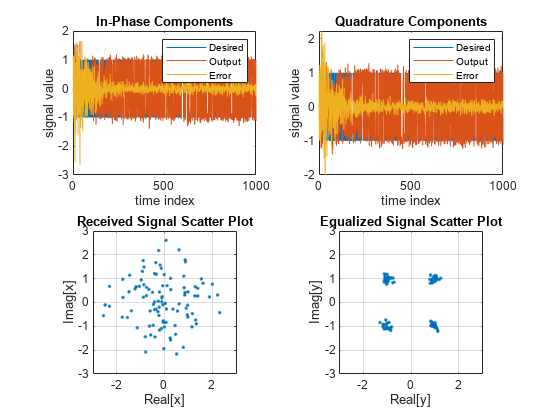
基于32系数FIR滤波器的QPSK自适应均衡(1000迭代)
D = 16;%延迟采样次数B = exp(1i*pi/4)*[-0.7 1];%通道分子系数A = [1 -0.7];%通道分母系数正常= 1000关系;%迭代次数s =符号(randn(1,正常+ D)关系)+ 1我*签署(randn(1,正常+ D)关系);%基带信号n = 0.1*(randn(1,ntr+D) + 1i*randn(1,ntr+D));%噪声信号r =过滤器(b, a, s) + n;%接收信号x = r (1 + D:正常+ D关系);%输入信号(接收信号)d = s(1:正常)关系;%期望信号(延迟QPSK信号)μ= 0.1;%步长阿宝= 4;%投影顺序抵消= 0.05;协方差矩阵的偏移量apf = dsp。AffineProjectionFilter (“长度”32岁的...“StepSize”亩,“ProjectionOrder”阿宝,...“InitialOffsetCovariance”,抵消);(y, e) = apf (x, d);次要情节(2 2 1);阴谋(1:正常,关系真实([d; y; e]));标题(同相分量的);传奇(“想要的”,“输出”,“错误”);包含(“时间指数”);ylabel (的信号值);次要情节(2,2,2);阴谋(1:正常,关系图像放大([d; y; e]));标题(“正交组件”);传奇(“想要的”,“输出”,“错误”);包含(“时间指数”);ylabel (的信号值);次要情节(2、2、3);情节(x(正常- 100:关系正常)的关系,“。”);轴([-3 3 -3]);标题(“接收信号散点图”);轴(“广场”);包含(“真正的[x]”);ylabel (图像放大[x]”);网格在;次要情节(2、2、4);情节(y(正常- 100:关系正常)的关系,“。”);轴([-3 3 -3]);标题(“均衡信号散点图”);轴(“广场”);包含(“真正的[y]”);ylabel (图像放大[y]”);网格在;
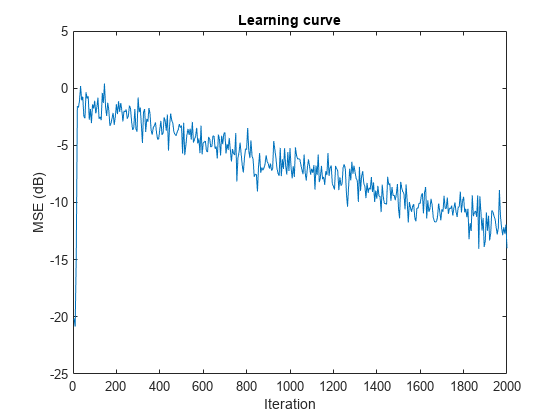
基于仿射投影滤波器的FIR滤波器系统辨识
请注意:如果你正在使用R2016a或更早的版本,将每个对对象的调用替换为等价的一步语法。例如,obj (x)就变成了步骤(obj, x).
0.5公顷= fir1(31日);需识别的FIR系统冷杉= dsp。FIRFilter (“分子”,哈);iir = dsp。IIRFilter (“分子”sqrt (0.75),...“分母”-0.5 [1]);x = iir(标志(randn(2000年25)));观测噪声信号n = 0.1 * randn(大小(x));%期望信号d =冷杉(x) + n;%滤波器长度l = 32;%仿射投影滤波器步长。μ= 0.008;%抽取因子分析%和模拟结果m = 5;apf = dsp。AffineProjectionFilter (l,“StepSize”μ);[simmse, meanWsim Wsim traceKsim] = msesim (apf, x, d, m);情节(m *(1:长度(simmse)), 10 * log10 (simmse));包含(“迭代”);ylabel (“MSE (dB)”);%绘制仿射投影滤波器的学习曲线%用于系统标识标题(“学习曲线”)
算法
仿射投影算法(APA)是一种基于多个输入向量估计未知系统的自适应方案[1].该算法旨在提高其他自适应算法的性能,主要是基于LMS的自适应算法。仿射投影算法重用旧数据,当输入信号高度相关时,可以快速收敛,从而产生一系列算法,可以在计算复杂度和收敛速度之间进行权衡[2].
下面的公式描述了设计AP过滤器时使用的概念算法:
在哪里C要么是ε我如果初始偏移协方差是标量ε,或R如果初始偏移协方差是一个矩阵R.变量如下:
| 变量 | 描述 |
|---|---|
| n | 当前时间指数 |
| u (n) | 步骤的输入样本n |
| U美联社(n) | 最后的矩阵l+1输入信号向量 |
| w(n) | 自适应滤波系数向量 |
| y (n) | 自适应滤波器输出 |
| d (n) | 所需的信号 |
| e (n) | 步长误差n |
| l | 投影的顺序 |
| N | 过滤顺序(例如,过滤长度=N+ 1) |
| μ | 步长 |
参考文献
[1]“基于正交投影到仿射子空间的自适应滤波算法及其性质”,电子。Commun。日本。67-A(5), 1984年5月,第19-27页。
保罗·s·r·迪尼兹,自适应滤波:算法与实践,第二版。波士顿:克鲁尔学术出版社,2002年。
扩展功能
你也可以从以下列表中选择一个网站: