dsp。RLSFilter
使用递归最小二乘(RLS)算法计算输出、误差和系数
描述
的dsp。RLSFilter系统对象™使用RLS过滤器实现对输入的每个通道进行过滤。
要过滤输入的每个通道,请执行以下操作:
创建
dsp。RLSFilter对象并设置其属性。使用参数调用对象,就像调用函数一样。
要了解更多关于System对象如何工作的信息,请参见什么是系统对象?
创造
描述
rlsFilt= dsp。RLSFilterrlsFilt。此系统对象使用RLS算法计算给定输入和期望信号的滤波输出、滤波误差和滤波器权重。
rlsFilt=dsp.RLSFilter(伦恩)rlsFilt.这个System对象具有长度属性设置为伦恩.
rlsFilt=dsp.RLSFilter(名称,值)
性质
用法
描述
输入参数
输出参数
对象的功能
要使用对象函数,请指定System对象作为第一个输入参数。例如,释放名为system的对象的系统资源obj,使用下面的语法:
释放(obj)
例子
基于RLS滤波器的FIR滤波器系统辨识
使用递归最小二乘(RLS)滤波器识别用低通FIR滤波器建模的未知系统。比较未知系统和估计系统的频率响应。
请注意:如果你正在使用R2016a或更早的版本,将每个对对象的调用替换为等价的步语法。例如,obj(x)变成步骤(obj,x).
初始化
创建一个数字信号处理器对象,表示要识别的系统。传递信号x到FIR滤波器。未知系统的输出是期望信号d,即未知系统(FIR滤波器)输出与加性噪声信号之和n.
filt=dsp.FIRFilter(“分子”二十五分,fir1(10日));x = randn (1000 1);n = 0.01 * randn (1000 1);D = filt(x) + n;
自适应滤波器
创建一个dsp。RLSFilter对象创建RLS滤波器。将滤波器的长度设置为11个抽头,遗忘因子设置为0.98。传递主输入信号x以及所需的信号d到RLS滤波器。输出y自适应滤波器的特征是信号收敛到期望信号d从而使误差最小化e在两个信号之间。
rls=dsp.RLSFilter(11,“遗忘因子”[y,e]=rls(x,d);w=rls.系数;
绘制结果
输出信号与所需信号匹配,使两者之间的误差接近于零。
图(1:1000,[d,y,e]);标题(“FIR滤波器的系统识别”);传奇(“渴望的”,“输出”,“错误”);包含(“时间指数”); 伊拉贝尔(“信号值”);

比较权重
权重向量w表示适于类似未知系统(FIR滤波器)的RLS滤波器的系数。为确认收敛性,请比较FIR滤波器的分子和RLS滤波器的估计权重。
估计的滤波器权值与实际的滤波器权值紧密匹配,证实了在前面信号图中看到的结果。
茎([filt.Numerator;w]。');传奇(“实际”,“估计”);包含(“系数#”); 伊拉贝尔(“系数值”);

基于RLS算法的系统逆辨识
这个例子演示了使用逆系统辨识模型的RLS自适应算法。

将自适应滤波器与未知滤波器级联导致自适应滤波器收敛到与未知系统相反的解。
若未知系统和自适应滤波器的传递函数为H(z),G(z)分别在以下情况下,期望信号和级联系统信号之间的测量误差达到其最小值:G (z) H(z)=1.要使这个关系成立,G(z)必须等于1/H (z),未知系统传递函数的逆。
要证明这是正确的,请创建一个信号年代输入到级联滤波器对。
s=randn(3000,1);
在级联滤波器的情况下,未知滤波器导致信号到达两个滤波器后的和点的延迟。为了防止自适应滤波器试图适应它还没有看到的信号(相当于预测未来),将期望的信号延迟12个样本,这是未知系统的顺序。
通常,您不知道您试图识别的系统的顺序。在这种情况下,延迟所需信号的采样数等于自适应滤波器的一半阶数。延迟输入需要在输入前添加12个零值样本年代.
延迟= 0(12日1);d =[延迟;s (1:2988)];%连接延迟和信号。
您必须保持所需的信号向量d长度与x,因此调整信号元素计数以允许延迟采样。
虽然不是通常的情况,在这个例子中,你知道未知滤波器的顺序,所以添加一个等于未知滤波器的顺序的延迟。
对于未知系统,使用低通12阶FIR滤波器。
filt = dsp.FIRFilter;filt。0.55分子= fir1(12日,“低”);
过滤年代为自适应算法功能提供输入数据信号。
x=过滤器;
要使用RLS算法,请创建dsp。RLSFilter对象,并设置其长度,遗忘因子和InitialInverseCovariance财产。
有关准备RLS算法对象的输入条件的更多信息,请参阅dsp。RLSFilter.
P0 = 2 *眼(13);λ= 0.99;rls = dsp。RLSFilter(13,“遗忘因子”λ,...“初始反向方差”、p0);
这个例子寻求一个反解,你需要小心哪个信号携带数据,哪个是想要的信号。
先前的自适应滤波器示例使用滤波后的噪声作为所需信号(x)携带未知系统的信息。高斯分布和方差为1时,未过滤的噪声d是所需的信号。运行此自适应过滤器的代码为:
[y,e]=rls(x,d);
哪里y返回过滤后的输出和e包含错误信号作为滤波器自适应寻找未知系统的逆。
获得RLS滤波器的估计系数。
b=rls系数;
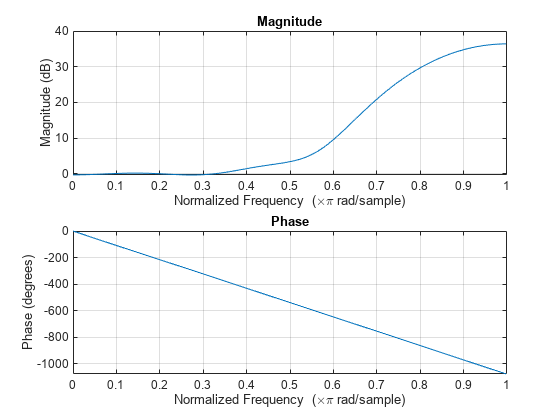
查看自适应RLS滤波器的频率响应(逆系统,G(z) )使用freqz.逆系统看起来像一个线性相位的高通滤波器。
freqz (b, 1)
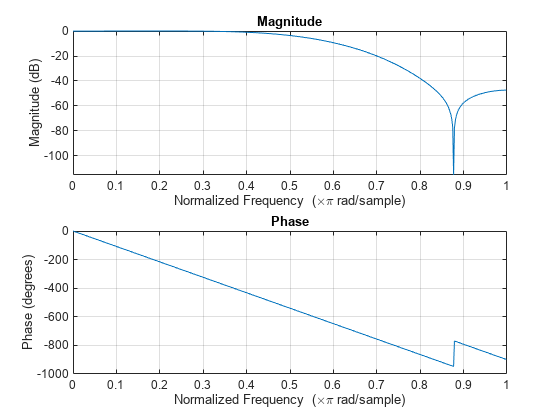
查看未知系统的频率响应,H(z) 。响应是截止频率为0.55的低通滤波器的响应。
freqz (filt.Numerator, 1)
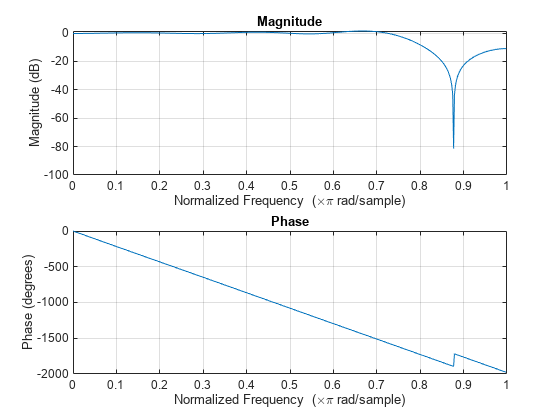
未知系统和自适应滤波器级联的结果是一个补偿系统,扩展截止频率为0.8。
overallCoeffs = conv (filt.Numerator, b);freqz (overallCoeffs, 1)
使用RLS滤波器消除噪声
使用RLS滤波器消除添加到未知系统的加性噪声n。RLS滤波器调整其系数,直到其传递函数与未知系统的传递函数尽可能接近。自适应滤波器的输出与未知系统的输出之间的差值为误差信号e,表示加性白噪声。使误差信号最小化是自适应滤波器的目标。
请注意如果你正在使用R2016a或更早的版本,用等价的步骤语法替换每个对象调用。例如,obj(x)变成步骤(obj,x).
初始化
创建一个数字信号处理器系统对象™表示未知的系统。创建一个dsp。RLSFilter对象并将长度设置为11个抽头。将方法设置为“户主RLS”.创建一个正弦波来表示添加到未知系统中的噪声。在时间范围内查看信号。
帧大小=100;NIter=10;rls=dsp.RLSFilter(“长度”,11,...“方法”,“户主RLS”); filt=dsp.FIRFilter(“分子”,...fir1(10。5,综合成绩]));sinewave = dsp。SineWave (“频率”, 0.01,...“采样器”,1,...“SamplesPerFrame”, FrameSize);范围= timescope (“LayoutDimensions”(2 - 1),...“NumInputPorts”,2,...“TimeUnits”,“秒”,...“YLimits”,[-2.5 2.5],...“BufferLength”2 * FrameSize *硝石,...“动态显示”,1,...“ShowLegend”符合事实的...“ChannelNames”,{噪声信号的},...“动态显示”,2,...“ShowLegend”符合事实的...“ChannelNames”,{误差信号的});为k=1:NIter x=randn(帧大小,1);d=filt(x)+正弦波();[y,e]=rls(x,d);w=rls.系数;作用域(d,e)结束(范围)

算法
的dsp。RLSFilter系统对象,当传统的RLS选择后,递归计算最小二乘估计(RLS)FIR滤波器权重的。系统对象估计将输入信号转换为所需信号所需的滤波器权重或系数。输入信号可以是标量或列向量。所需信号必须具有与输入信号相同的数据类型、复杂性和维数。相应的RLS滤波器以ma表示trix表格asP(n) :
在λ-1表示指数加权因子的倒数。变量如下:
| 变量 | 描述 |
|---|---|
| n | 当前时间索引 |
| u(n) | 步骤中缓冲输入样本的向量n |
| P(n) | 阶跃逆相关矩阵的共轭n |
| k(n) | 步进增益矢量n |
| k*(n) | 复共轭k |
| w(n) | 阶跃滤波器抽头估计向量n |
| y(n) | 步骤中的过滤输出n |
| e(n) | 阶跃估计误差n |
| d (n) | 期望的阶跃响应n |
| λ | 遗忘因子 |
u,w和k都是列向量。
参考文献
[1] 我是海斯,统计数字信号处理与建模,纽约:威利,1996年。
[2] 海金,自适应滤波理论,第四版,上鞍河,NJ: Prentice Hall, 2002。
[3] A.A.Rontogiannis和S.Theodoridis,“逆因式分解自适应最小二乘算法,”信号处理号,第52卷。1,第35-47页,1996年7月。
[4] S.C. Douglas,“数字稳健的O(N)2使用最小二乘预白化的RLS算法声学、语音和信号处理,土耳其伊斯坦布尔,vol. I, pp. 412-415, 2000年6月。
A. H.赛义德,自适应滤波的基础,新泽西州霍博肯:约翰·威利父子公司,2003年。
扩展能力
您还可以从以下列表中选择网站: