LMS更新
估计LMS自适应滤波器的权值
- 库:
DSP系统工具箱/滤波/自适应滤波器
描述
的LMS更新块估计LMS自适应滤波器的权值。块接受数据和错误作为输入,并根据块选择的算法计算过滤器权重。更多算法请参见算法.
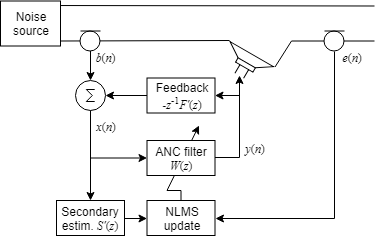
您可以使用此块来计算应用程序中的自适应滤波器权重,如系统识别、反建模和滤波x LMS算法,这些算法用于消除噪声。有关详细信息,请参见参考文献.
港口
输入
输出
参数
模型的例子
块特征
数据类型 |
|
直接引线 |
|
多维信号 |
|
适应信号 |
|
讨论二阶导数过零检测 |
|
算法
块计算过滤器权重估计使用 .
这个函数 是根据您通过算法参数:
LMS- - - - - -归一化LMS- - - - - -在
归一化LMS算法,ε是一个小的正常数,它克服了权值更新中可能存在的数值不稳定性。对于双精度浮点输入,ε是
2.2204460492503131 e - 016.对于单精度浮点输入,ε是1.192092896 e-07.为定点输入,ε是0。符号误差LMS- - - - - -Sign-Data LMS- - - - - - ,在那里u(n)是真实的Sign-Sign LMS- - - - - - ,在那里u(n)是真实的
在前式中:
n—当前时间索引
u(n) -缓冲输入样本在步骤的向量n
u *(n) -缓冲输入样本在步长处的向量的复共轭n
w(n) -一步滤波器权重估计的向量n
e (n)-步长估计误差n
µ—适应步长
α-泄漏系数(0≤α≤1)
参考文献
Madisetti, Vijay和Douglas Williams。“自适应滤波器介绍。”数字信号处理手册。佛罗里达州博卡拉顿:CRC出版社,1999年。
Akhtar, m.t., M. Abe, M. Kawamata。“基于改进滤波x LMS算法的主动噪声控制系统,采用改进的在线辅助路径建模。”IEEE电路与系统研讨会,2004。
扩展功能
另请参阅
块
对象
你也可以从以下列表中选择一个网站: