主要内容
霍尔速度和位置
利用霍尔传感器计算转速和估计转子位置
- 库:
电机控制模块/传感器解码器
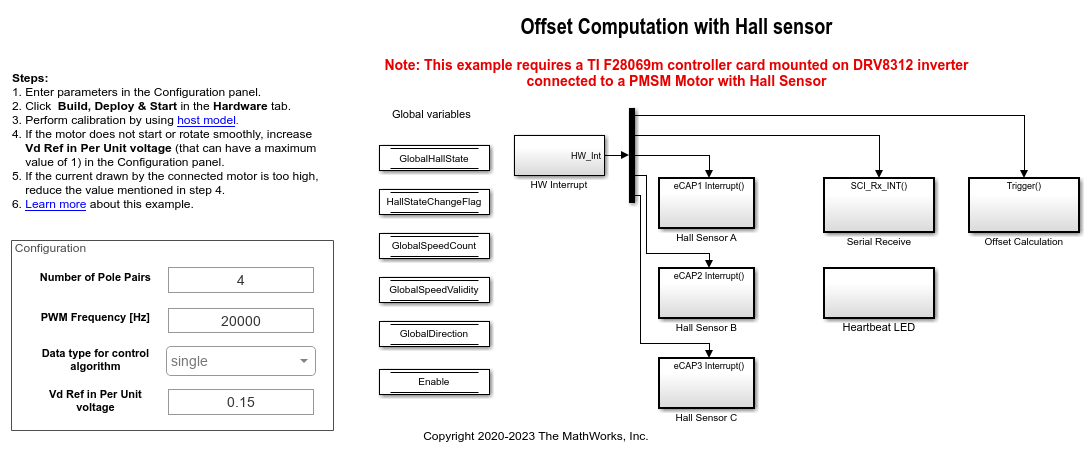
描述
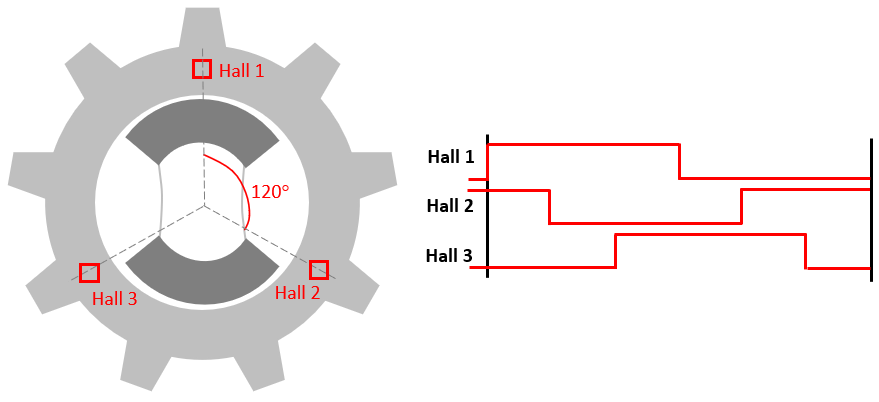
的霍尔速度和位置块通过跟踪霍尔状态的变化来计算转子的机械速度。该块还通过使用方向、霍尔状态和外部计数器值输入来估计转子的电气位置。
块在控制器算法定义的固定时间间隔后周期性地执行。
港口
输入
输出
参数
扩展功能
介绍了R2020a
你也可以从以下列表中选择一个网站:
利用霍尔传感器计算转速和估计转子位置
电机控制模块/传感器解码器
的霍尔速度和位置块通过跟踪霍尔状态的变化来计算转子的机械速度。该块还通过使用方向、霍尔状态和外部计数器值输入来估计转子的电气位置。
块在控制器算法定义的固定时间间隔后周期性地执行。
你也可以从以下列表中选择一个网站:
