文档帮助中心文档
使用定位和姿态估计算法来定位您的车辆在您的环境中。惯性传感器融合使用滤波器来改善和组合IMU、GPS和其他传感器读数。定位算法,如蒙特卡罗定位和扫描匹配,利用距离传感器或激光雷达读数在已知地图上估计你的姿势。姿态图跟踪你估计的姿态,并可以基于边缘约束和循环闭包进行优化。
要模拟特定的传感器,请参见传感器模型.
有关同步本地化和映射,请参见大满贯.
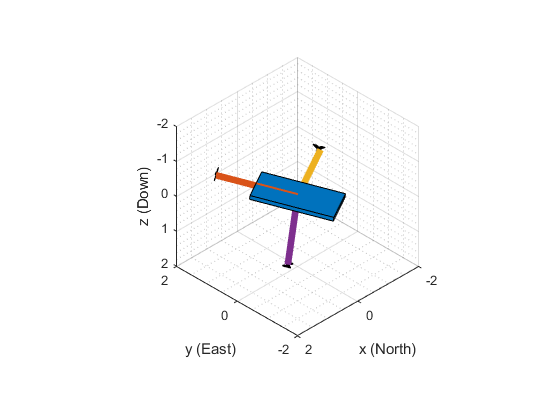
如何构建适用于无人机(uav)或四轴飞行器的IMU + GPS融合算法。
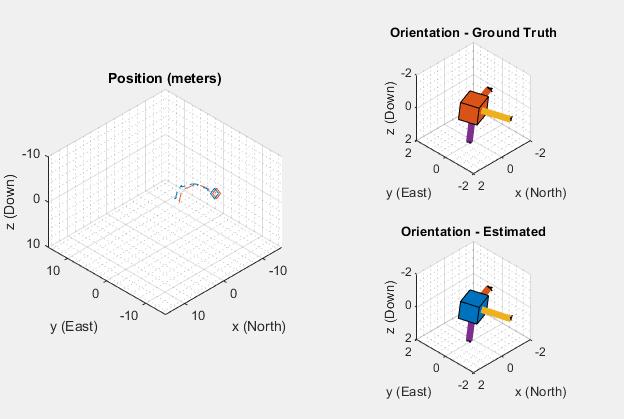
使用惯性测量单元(IMU)和单目摄像机估计地面车辆的姿态(位置和方向)。在这个例子中,你:
MATLAB Mobile™报告来自苹果或Android移动设备上的加速度计、陀螺仪和磁力计的传感器数据。可以获得每个传感器的原始数据或融合的方向数据。这个例子展示了如何比较来自手机的融合方向数据和来自ahrsfilter对象的方向估计。
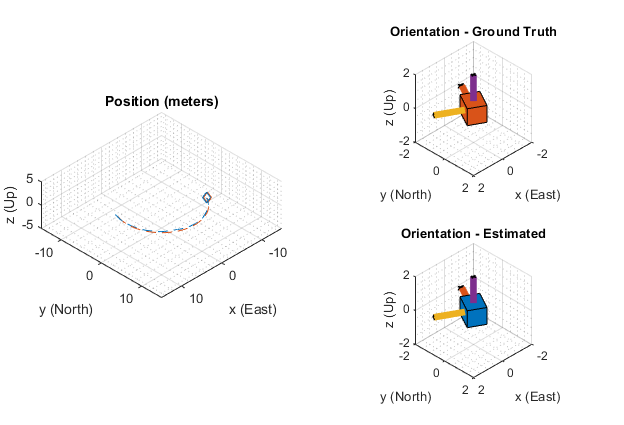
通过融合惯性测量单元(IMU)和全球定位系统(GPS)接收器的数据来估计地面车辆的位置和方向。
将机器人里程测量数据和观察到的基准标记AprilTags结合起来,可以更好地估计机器人的轨迹和环境中的地标位置。
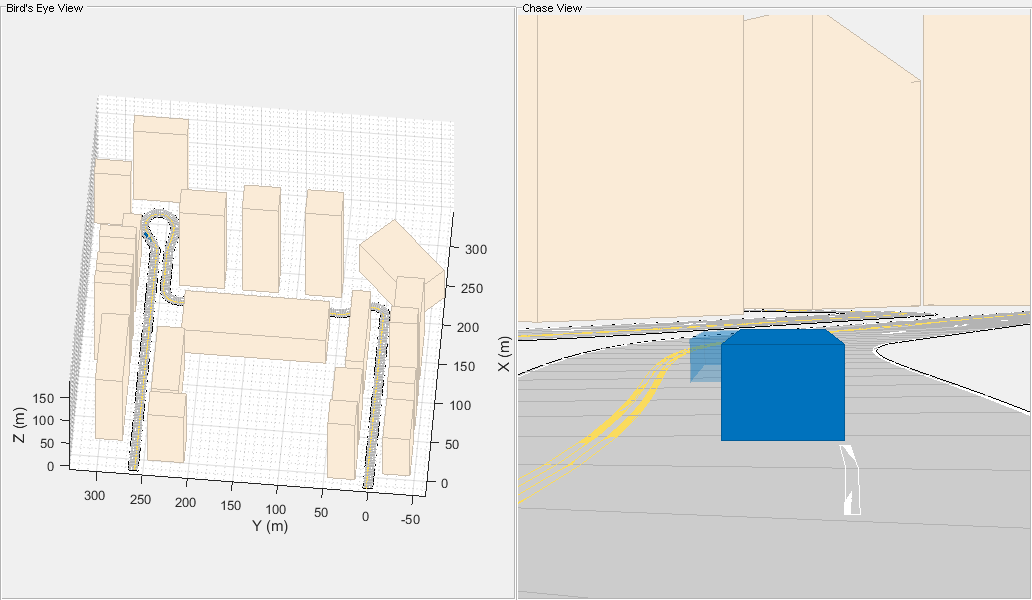
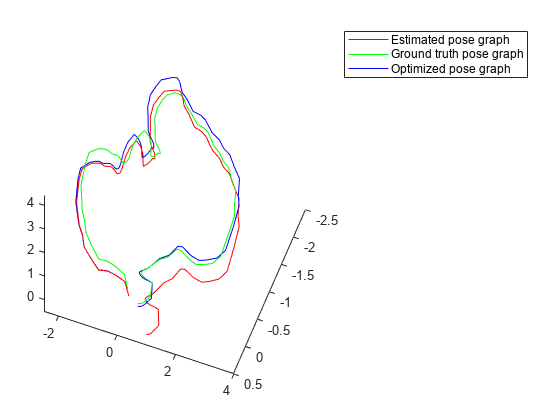
利用三维姿态图优化减小单目摄像机估计轨迹(位置和方向)中的漂移。视觉里程计估计相机当前的全局姿态(当前帧)。由于三维点三角剖分匹配不佳或存在误差,使得机器人的轨迹往往偏离地面实际。环路闭合检测和位姿图优化可以减少这种漂移并纠正错误。
你点击一个链接对应于这个MATLAB命令:
通过在MATLAB命令窗口中输入命令来运行命令。Web浏览器不支持MATLAB命令。金宝app
选择一个网站,在那里获得翻译的内容,并看到当地的活动和优惠。根据您的位置,我们建议您选择:.
你也可以从以下列表中选择一个网站:
选择中国网站(中文或英文)以获得最佳网站性能。其他MathWorks国家站点没有针对您所在位置的访问进行优化。
与当地办事处联系