trapveltraj
语法
描述
例子
计算梯形速度为二维平面运动轨迹
使用trapveltraj函数与一个给定的一组二维xy锚点。
wpt = [0 45 15 90 45;90 45 -45 15 90];
计算一个给定数量的样本的轨迹(501)。函数输出轨迹的位置(问)、速度(qd)、加速度(qdd),时间向量(tvec)和多项式系数(页)实现路径点的多项式使用梯形速度。
(q, qd、qdd tvec, pp) = trapveltraj (wpt, 501);
情节的轨迹x -和y每个路径点之间的位置和梯形速度剖面。
次要情节(2,1,1)情节(tvec q)包含(“t”)ylabel (“职位”)传说(“X”,“Y”次要情节(2,1,2)情节(tvec, qd)包含(“t”)ylabel (“速度”)传说(“X”,“Y”)

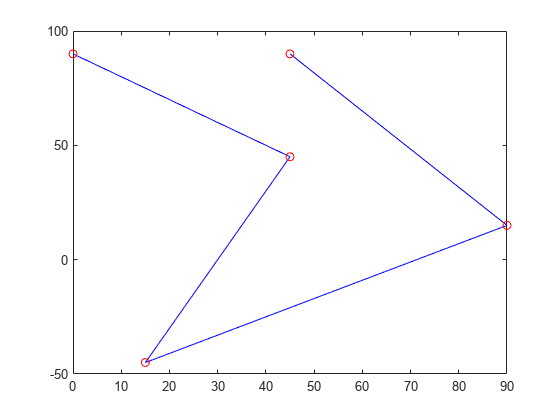
你也可以验证实际的位置在二维平面上。情节的单独的行问向量和锚点x -和y -的位置。
图绘制(q (1:), q (2:)“- b”wpt (:), wpt (2:)”或“)
输入参数
输出参数
引用
[1](merrill Lynch)、凯文·M。,和Frank C. Park.现代机器人技术:力学、计划和控制。剑桥:剑桥大学出版社,2017年。
[2]Spong马克·W。,Seth Hutchinson, and M. Vidyasagar.机器人的建模和控制。约翰威利& Sons, 2006。
扩展功能
版本历史
介绍了R2019a