纯追求控制器
纯追求是一种路径跟踪算法。它计算角速度命令,使机器人从当前位置移动到机器人前面的某个前视点。假设线速度是恒定的,因此你可以在任何点改变机器人的线速度。然后算法根据机器人当前的位置移动路径上的前瞻点,直到路径的最后一点。你可以把它想象成一个机器人不断地追逐它前面的一个点。属性LookAheadDistance决定了前瞻点放置的距离。
的controllerPurePursuit对象不是传统的控制器,而是用于路径跟踪目的的跟踪算法。您的控制器对于指定的航路点列表是唯一的。可以指定所需的线性和最大角速度。这些特性是根据车辆规格确定的。给定车辆的姿势(位置和方向)作为输入,对象可用于计算机器人的线性和角速度命令。机器人如何使用这些命令取决于你正在使用的系统,所以考虑机器人如何能够执行给定这些命令的运动。最后一个重要属性是LookAheadDistance,它告诉机器人要沿着路径走多远。下面一节将对此属性进行更详细的解释。
参考坐标系
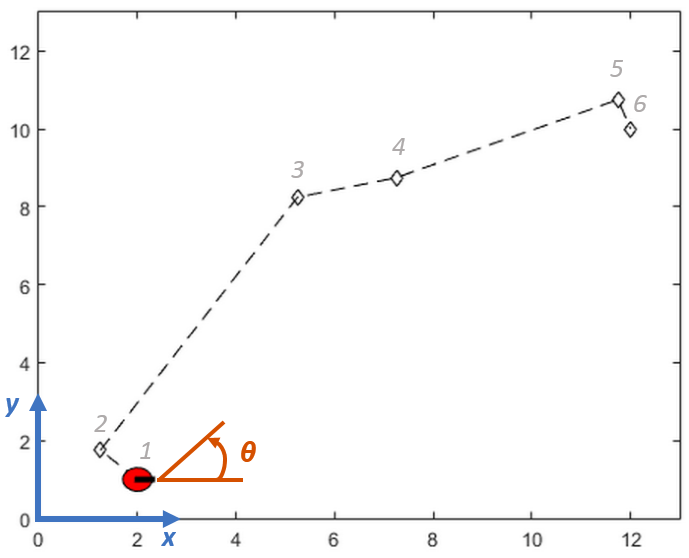
理解纯追踪算法的输入和输出所使用的参考坐标系是很重要的。下图为参考坐标系。输入路径点为(x, y)坐标,用于计算机器人的速度指令。机器人的姿态输入为点的姿态和姿态(theta)列表(x yθ).积极的x和y方向分别为右方向和上方向(图中蓝色部分)。的θ值是机器人的角度方向,以逆时针方向为单位,以弧度为单位x-axis(机器人当前在0弧度)。
展望未来的距离
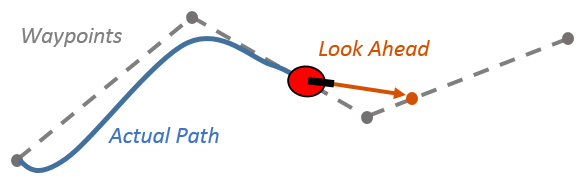
的LookAheadDistance属性是控制器的主要调整属性。向前看距离是指机器人在计算角速度指令时,应沿路径距离当前位置的距离。下图显示了机器人和前视点。如图所示,请注意实际路径与航路点之间的直线不匹配。
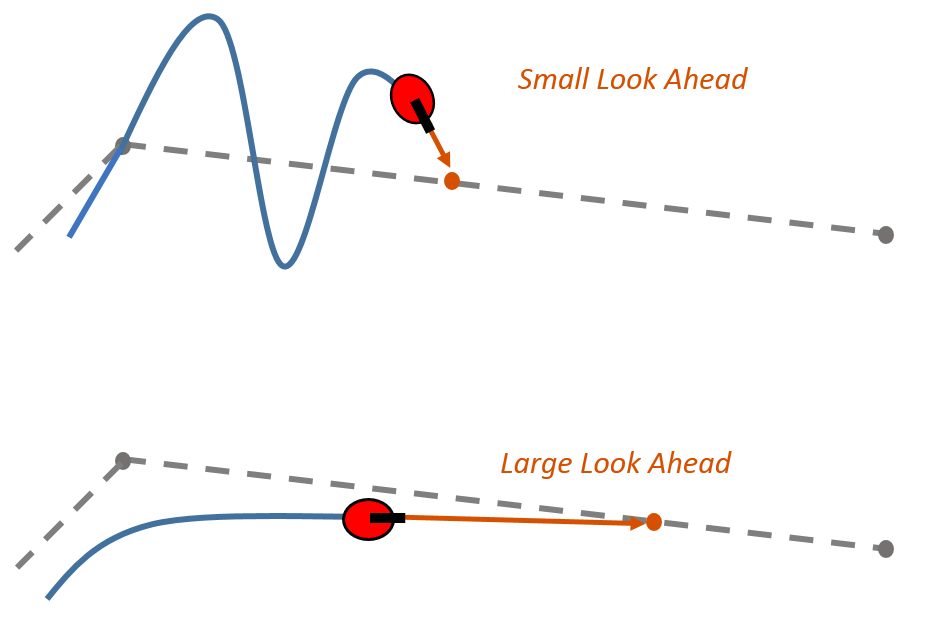
改变这个参数的效果可以改变机器人跟踪路径的方式,有两个主要目标:重新获得路径和维护路径。为了快速恢复路径之间的路径点,一个小的LookAheadDistance会使你的机器人快速移动到路径上。然而,如下图所示,机器人在路径上过冲并沿期望路径振荡。为了减少沿路径的振荡,可以选择更大的前视距离,然而,这可能会导致拐角附近更大的曲率。
的LookAheadDistance属性应针对您的应用程序和机器人系统进行调整。不同的线速度和角速度也会影响该响应,因此路径跟踪控制器应予以考虑。
限制
关于这种纯追踪算法,有一些限制需要注意:
如上所示,控制器不能完全遵循路径点之间的直接路径。必须调整参数以优化性能,并随着时间的推移收敛到路径。
这种纯追踪算法不能使机器人稳定在某一点上。在您的应用程序中,目标位置的距离阈值应该被应用,以使机器人在期望的目标附近停止。
工具书类
[1]库尔特,R。实现了纯追踪路径跟踪算法.卡内基梅隆大学,匹兹堡,宾夕法尼亚州,1990年1月。
另请参阅
stateEstimatorPF|控制器FH(导航工具箱)
你也可以从以下列表中选择一个网站: