建立和操纵不确定模型
这个例子展示了如何使用鲁棒控制工具箱™建立不确定状态空间模型和分析不确定元素反馈控制系统的鲁棒性。
我们将展示如何指定不确定的物理参数,并从这些参数创建不确定的状态空间模型。您将看到如何使用这些函数评估随机和最差情况参数变化的影响usample和robstab.
两车和弹簧系统
在这个例子中,我们使用以下系统,由两个由弹簧连接的无摩擦小车组成k:
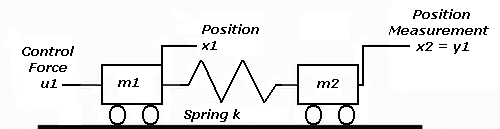
图1:两车弹簧系统。
控制输入是力u1适用于左边的推车。要控制的输出是位置日元右边的马车。反馈控制的形式如下:
此外,我们使用了一个三引线补偿器:
我们使用下面的代码创建这个补偿器:
s = zpk (“年代”);%拉普拉斯变量C = 100 * ss ((s + 1) /(措施* s + 1)) ^ 3;
框图模型
两车和弹簧系统的模型如下图所示。
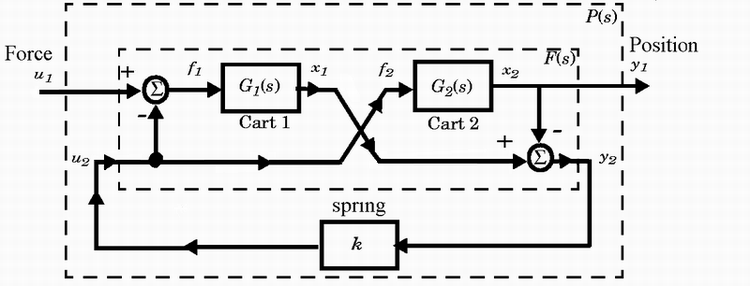
图2:二车及弹簧模型框图。
不确定的实际参数
控制小车的问题由于弹簧常数的值而变得复杂k和车质量m1, m2只有20%的准确性:
,
,
.为了捕获这种可变性,我们将使用尿素的功能:
k =尿素的(“k”,1,“百分比”, 20);m1 =尿素的(“m1”,1,“百分比”, 20);m2 =尿素的(“平方米”,1,“百分比”, 20);
不确定车模型
我们可以将购物车模型表示如下:
给定不确定参数m1和平方米,我们将为G1和G2构建不确定状态空间模型(USS),如下:
G1 = 1 / s ^ 2 / m1;G2 = 1 / s ^ 2 /平方米;
闭环系统的不确定模型
首先,我们将构建一个植物模型P对应于上述方框图(P将u1映射到y1):
%无弹簧内块F(s)F = [0; g1]*[1 -1]+[1;-1]*[0, g1]
F = 2输出2输入4状态的不确定连续时间状态空间模型。模型不确定性包含以下模块:m1:不确定真实,名义= 1,可变性=(-20,20)%,1出现m2:不确定真实,名义= 1,可变性=(-20,20)%,1事件类型“F.NominalValue”的名义价值,“把(F)”所有属性,和“F.Uncertainty”与不确定的交互元素。
连接弹簧k
P =融通(F, k)
P = 1输出1输入4状态的不确定连续时间状态空间模型。k:不确定的真实,名义= 1,变异性=[-20,20]%,1个事件m1:不确定的真实,名义= 1,变异性=[-20,20]%,1个事件m2:输入“P. nominalvalue”可以看到名义值,“get(P)”可以看到所有属性,“P. uncertainty”可以与不确定元素相互作用。
反馈控制u1 = C*(r-y1)作用于被控对象P如下所示:

图3:闭环系统的不确定模型。
我们将使用反馈函数来计算从r到y1的闭环传递。
%不确定开环模型为L = P * C
L =不确定连续时间状态空间模型,具有1个输出,1个输入,7个状态。k:不确定的真实,名义= 1,变异性=[-20,20]%,1个事件m1:不确定的真实,名义= 1,变异性=[-20,20]%,1个事件m2:输入“L. nominalvalue”查看名义值,“get(L)”查看所有属性,“L. uncertainty”与不确定元素相互作用。
从r到y1的不确定闭环传递是
T =反馈(L, 1)
T = 1输出1输入7状态的不确定连续时间状态空间模型。k:不确定的真实,名义= 1,变异性=[-20,20]%,1个事件m1:不确定的真实,名义= 1,变异性=[-20,20]%,1个事件m2:输入“T. nominalvalue”查看名义值,“get(T)”查看所有属性,“T. uncertainty”与不确定元素相互作用。
注意,因为G1和G2都不确定,P和T为不确定状态空间模型。
提取标称植物
该装置的标称传递函数为
Pnom = zpk (P.nominal)
Pnom = 1 ------------- s ^ 2 (s ^ 2 + 2)连续时间零/钢管/增益模型。
标称闭环稳定
接下来,我们评估标称闭环传递函数Tnom,然后检查标称系统的所有极点都有负实部:
Tnom = zpk (T.nominal);maxrealpole = max(真正的(极(Tnom)))
maxrealpole = -0.8232
鲁棒稳定性裕度
对于所有可能的值,反馈循环是否保持稳定k, m1, m2在指定的不确定度范围内?我们可以使用robstab函数来严格地回答这个问题。
显示报告和计算灵敏度选择= robOptions (“显示”,“上”,“敏感”,“上”);[StabilityMargin, wcu] = robstab (T,选择);
计算峰……完成百分比:100/100系统对于模型的不确定性是稳健稳定的。-它可以容忍高达288%的模型不确定性。—不稳定扰动占模型不确定性的289%。这种扰动导致频率为575 rad/s的不稳定性。—对每个不确定元素的灵敏度为:k为12%。k增加25%则减少3%的差额。m1为47%。m1增加25%会使利润减少11.8%。m2为47%。m2增加25%,差额减少11.8%。
该报告指出,闭环系统可以承受高达三倍的变异性k, m1, m2之前不稳定。它还提供了有关稳定性对各参数灵敏度的有用信息。的变量wcu包含最小的不稳定参数变化(相对于标称值)。
wcu
wcu =结构体字段:K: 1.5773 m1: 0.4227 m2: 0.4227
最糟糕的性能分析
请注意闭环传输频率的峰值增益T指示闭环阶跃响应的超调水平。增益越接近1,超调越小。我们使用wcgain来计算最坏情况下的增益PeakGain的T超过规定的不确定度范围。
[PeakGain, wcu] = wcgain (T);PeakGain
PeakGain =结构体字段:LowerBound: 1.0474 UpperBound: 1.0731 CriticalFrequency: 7.1382
替换最坏情况参数变化wcu成T来计算最坏情况的闭环传输Twc.
Twc = usubs (T, wcu);最坏情况闭环转移
最后,从不确定参数的随机样本中选取相应的闭环传递与最坏情况传递进行比较Twc.
Trand = usample (T, 4);% 4不确定模型T的随机样本clf次要情节(211),bodemag (Trand“b”Twc,“r”, {1000});%图博德反应次要情节(212),步骤(Trand,“b”Twc,“r”, 0.2);%图阶跃响应
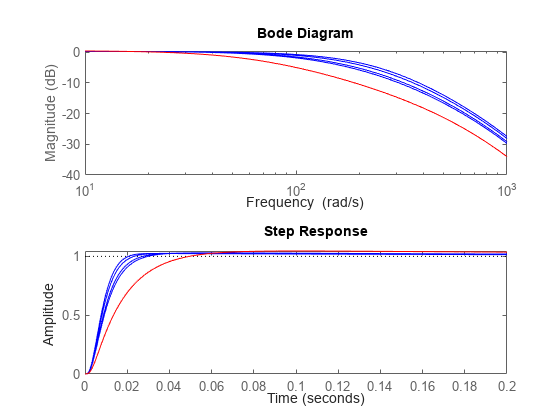
图4:波德图和阶跃响应。
在这个分析中,我们看到补偿器C对k,m1,m2上的指定不确定性具有鲁棒性。
另请参阅
尿素的|号航空母舰|robstab|wcgain|usubs
相关的话题
你也可以从以下列表中选择一个网站: