计算在命令行操作分规范
可以计算模型的稳态运行点®模型通过指定约束模型,输出,和输入,通过找到一个模型操作满足这些约束条件。金宝app在稳态操作点的更多信息,见操作点和计算稳态操作点。
找到一个操作点仿真软件模型,您可以通过编程方式使用修剪你的模型金宝appfindop在这个示例中所示。
或者,你可以修剪你的模型:
稳态经理。有关更多信息,请参见计算使用稳态Manager操作分规范。
模型线性化电路。有关更多信息,请参见从规范使用模型线性化电路计算操作点。
在这个例子中,你计算一个操作点来满足输出规范。使用类似的方法,您可以定义状态或输入规范。另外,你可以定义一个组合,输出和输入规范;你不需要使用,例如,只有国家规范。
有关削减你的模型以满足规范的更多信息,见计算稳态操作分规范。
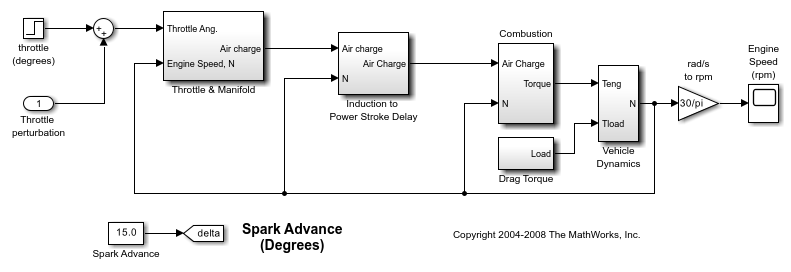
开放模型模金宝app型
打开仿真软件模型。金宝app
mdl =“scdspeed”;open_system (mdl)
定义操作点规范
创建一个默认的操作点规范模型。
opspec = operspec (mdl)
scdspeed opspec =操作点规范模型。(时变组件评估在时间t = 0): - - - - - - - - - - - x已知稳态分钟马克斯dxMin dxMax……………………………………(1) scdspeed /油门&歧管/进气歧管/ p0 = 0.543条0.543假真负无穷到正无穷负无穷到正无穷(2)scdspeed /车辆动力学/ w = t / / J w0 = 209 rad / / s 209.48假真负无穷到正无穷负无穷到正无穷输入:- - - - - - - - - - -你知道敏马克斯_____ _____ _____ _____ (1)scdspeed /节流扰动0错误负无穷到正无穷输出:- - - - - - - - - - -
因为没有根级输出模型中,默认的操作点规范对象没有输出规范。
对于这个示例,指定一个已知稳态发动机转速。为此,添加一个输出规范在rad / s的输出转速块。
opspec = addoutputspec (opspec,“scdspeed / rad / / s rpm”1);
指定的已知值2000年rpm为输出约束。
opspec.Outputs (1)。= 1;opspec.Outputs (1)。y = 2000;
查看更新后的操作规范。
opspec
scdspeed opspec =操作点规范模型。(时变组件评估在时间t = 0): - - - - - - - - - - - x已知稳态分钟马克斯dxMin dxMax……………………………………(1) scdspeed /油门&歧管/进气歧管/ p0 = 0.543条0.543假真负无穷到正无穷负无穷到正无穷(2)scdspeed /车辆动力学/ w = t / / J w0 = 209 rad / / s 209.48假真负无穷到正无穷负无穷到正无穷输入:- - - - - - - - - - -你知道敏马克斯_____ _____ _____ _____ (1)scdspeed /节流扰动0错误负无穷到正无穷输出:- - - - - - - - - - - y已知的最小最大_____ _____ _____ _____ (1)scdspeed / rad / / s 2000 rpm真正负无穷到正无穷
调整模型
找到一个符合这些规范操作点。
opspec op1 = findop (mdl);
操作点搜索报告:- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - opreport scdspeed =操作点搜索报告模型。(时变组件评估在时间t = 0)操作点规范成功实现。状态:- - - - - - - - - - - Min x马克斯dxMin dx dxMax………………………………(1) scdspeed /油门&歧管/进气歧管/ p0 = 0.543酒吧负0.54363正0 2.6649 e-13 0 (2) scdspeed /车辆动力学/ w = T / / J w0 = 209 rad / / s负209.4395正0 -8.4758 e-12 0输入:- - - - - - - - - - - Min u Max替_____ (1)scdspeed /油门扰动负0.0038183正输出:- - - - - - - - - - - Min y Max ____上(1)scdspeed / rad / / s rpm 2000 2000 2000
规范的操作点搜索报告显示成功了,这两个州都按预期处于稳定状态(dx= 0)。
您还可以指定范围的输出在修剪。例如,假设你知道之间有一个稳态条件1900年和2100年rpm。削减的速度范围,修改操作规范。
opspec.Outputs (1)。最小值= 1900;opspec.Outputs (1)。Max = 2100;
在这种情况下,因为你不知道输出值,指定输出作为未知。你也可以提供一个初始猜测为输出值。
opspec.Outputs (1)。知道= 0;opspec.Outputs (1)。y = 2050;
找到一个符合这些规范操作点。
《凤凰社》第2章= findop (mdl opspec);
操作点搜索报告:- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - opreport scdspeed =操作点搜索报告模型。(时变组件评估在时间t = 0)操作点规范成功实现。状态:- - - - - - - - - - - Min x马克斯dxMin dx dxMax………………………………(1) scdspeed /油门&歧管/进气歧管/ p0 = 0.543酒吧负0.5436正0 2.9879 e-13 0 (2) scdspeed /车辆动力学/ w = T / / J w0 = 209 rad / / s负209.4799正0 -9.8968 e-13 0输入:- - - - - - - - - - - Min u Max替_____ (1)scdspeed /油门扰动负0.0050021正输出:- - - - - - - - - - - Min y Max替_____ (1)scdspeed / rad / / s 1900 2000.3853 2100 rpm
操作点搜索报告显示,规范了成功。
削减你的模型之后,您可以:
在生成的操作点线性化模型。有关更多信息,请参见在修剪操作点线性化。
模拟模型生成的操作点。有关更多信息,请参见模拟仿真软件模型在金宝app特定的操作点。