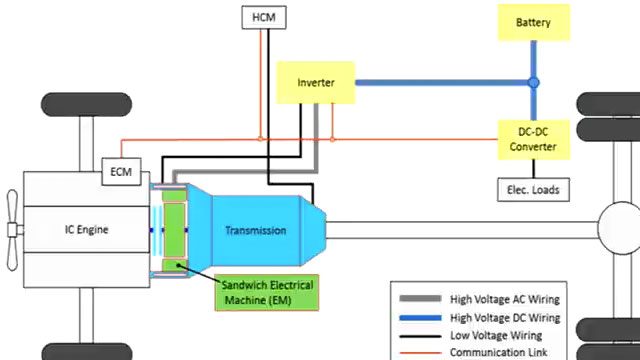
现在,让我们开始查看无刷电机的方向控制算法。你可以从这个概述系统[听不清]图中看到,我们通过领子区分控制算法和物理系统。从控制方面来说,有很多元件,如Park、Clark变换来覆盖静止参考前和同步参考前之间的电流和电压。在外回路中,我们有速度控制器,在回路中,是电流控制器。为了接近控制,我们也有位置或速度作为反馈,无论是传感器解码逻辑或盒子观察者,为那些对无意义控制感兴趣的人。
为了让演示更有趣,现在,我不向你们展示燃油或充气控制的实施,我想向你们展示我们如何设计最大扭矩每安培,MTPA,在减弱控制。因此,现在速度控制的输出和电流控制器的输入都嵌入了MTPA和燃油弱化。在这种情况下,基于MTPA和燃油弱化算法计算q和b气体的电流参考值,以获得最大扭矩和最小损失。
让我们快速回顾一下。什么是无刷电机的磁场减弱控制?这意味着什么?这么做的动机是什么?典型地,在FOC中,我们运行电机在一个限制离基b。在一些应用之前,我们想运行电机超过基速度,在那里反电动势将增加,并超过电源电压。所以磁场弱化控制的想法是帮助我们在不降低电压的情况下实现更高的速度。
所以我们操纵电流轴,使其为负值,这意味着我们减少了燃料电流,所以施加的定子磁场,与转子磁场方向相反。结果是,产生的磁场减小了。现在,反电动势减小了。所以那些减少的转子磁链,这允许电机运行在两个基地b。
为了达到最大的扭矩/安培,MTPA,是为了提高机器的效率和最小化循环损耗的状态,如图右边所示。蓝色凹曲线为同心线,表示IQ和IB对沿这些线产生的总力相同,但只有同心线与MPPL线和其他能够实现MTPA的工作点相交。
现在,我们有了一个精确的计划模型,可以设计所有的控制器了。我们将开始把自由方向控制算法与MTPA一起放在一起,是一个削弱能力,包括传感器解码器或观察员,如果你想实现人口普查控制。
我们来看看我们的模型。在这里,我们有速度控制器,计算IQ和IB参考跟踪希望的速度。人们似乎注意到,磁场减弱和MTPA控制参考已经在这里实施。转矩和速度参考是输入变量。输出的智商
和IB是基于MTPA轨迹计算的,以产生所需的最佳转矩和最小电流幅度。
此外,当我们仔细观察,我们可以启用或禁用车辆弱化控制,取决于操作速度条件。现在,我们不能太接近燃料方向电流控制系统。我们有[听不清]基于矢量发生器。当我们深入到IQ和IB PI调节器时,我们可以看到一个场弱化控制是用来控制IB参考的。记住,我们必须注入负电流来降低反电动势电压。
接下来,我将导航到一个[听不清]系统,这是传感器处理电流和位置测量。在位置测量中,你可以看到我们如何使用来自电机控制模块集的模块解码正交编码器读数。在这里,我给你们展示我们是如何计算UP周期被写进微控制器上的PWM驱动器的。在这里,我也向你们展示了逆变器和马达的运行模型,这样我们就可以在相关的闭环中绕圈了。
现在,我想向您展示一个工作流如何调整环路增益的电流和速度控制器。需要注意的是,所有从Motor Control Blockset发货的演示,包括这里的一个,都带有脚本,当电机初始化之前的模拟或热电联产自动运行。如脚本所示,在这里,我们设置我们的采样率,在传感器的计算偏移中加载估计的电机参数。
因此,在设定了周长之后,我们可以使用所提供的实用程序,最终根据电机和逆变器的参数值计算过负荷增益。一个脚本使用计算机增益和电机参数值自动计算增益和相位裕度为我们的[听不清]生物钟,响应,通过使用控制系统工具箱。在工作空间中,这里,你可以看到我们有估计的马达参数,传感器偏移量,和计算的预定量。
因此,对于环路增益的调谐,电机控制模块集不仅有经验计算,而且,FOC自动调谐器最终可以计算或增益空间的带宽和基础裕度,你指定。你也可以使用Simulink控件设计的其他工具来控制游戏。金宝app让我们在闭环模拟的控制算法中移动它们。
正如您从左上角所看到的,我们可以通过选择Simscape Electrical来模拟带有切换事件的计划模型,然后与不使用每个值反转模型的模拟进行比较。模拟结束后,我们可以查看数据检查器。
我们要看看速度响应,智商响应,a相电压和电流,最后,后宽度调制波形。正如你可以看到的速度命令跟踪,在第一个看起来很好与速度反馈跟随我们进来。让我们看看[听不清]命令跟踪响应的第二行。我们可以看到那些开关效应,其中黄色突出显示,和蓝色线显示的电流模型的平均值逆变器。
我们为什么要调弦?我们可以清楚地看到[听不清]在相电压和电流图中的切换。最后,当我们得到一个PWM调制波形时,这两轮之间并没有很大的区别,但底线是我们可以带来不同水平的稳定性取决于我们的测试区域。当我们离开这里时,我们可以清楚地看到切换事件的影响。