 克里夫的角落:克里夫硅藻土在数学和计算
克里夫的角落:克里夫硅藻土在数学和计算 MATLAB的博客
MATLAB的博客 史蒂夫与MATLAB图像处理
史蒂夫与MATLAB图像处理 人在仿真软件金宝app
人在仿真软件金宝app 人工智能
人工智能 开发区域
开发区域 斯图尔特的MATLAB视频
斯图尔特的MATLAB视频 在标题后面
在标题后面 文件交换的选择
文件交换的选择 汉斯在物联网
汉斯在物联网 学生休息室
学生休息室 MATLAB社区
MATLAB社区 MATLABユーザーコミュニティー
MATLABユーザーコミュニティー 创业、加速器,和企业家
创业、加速器,和企业家 自治系统
自治系统一条腿,跳像弹簧单高跷,并可能有一天取代跳跳虎在迪斯尼吗?
没有什么可以取代跳跳虎!但迪斯尼并创建一个独腿机器人可能挑战跳跳虎跳比赛冠军。这pogobot重量不到5磅,身高大约12英寸,可以反弹,并不相连,19日反弹。它是一个自治,天马行空,跳跃的机器人,它是第一个的。
据瘾科技,“迪斯尼的研究部门透露,去年,该公司的目标之一是让生活…机器人的虚构人物。好吧,各位,我们现在可能见证机器人跳跳虎的诞生。的老鼠的科学家们设计了一个有弹性的机器用一条腿能跳不支持。”金宝app

图片来源:迪斯尼
机器人
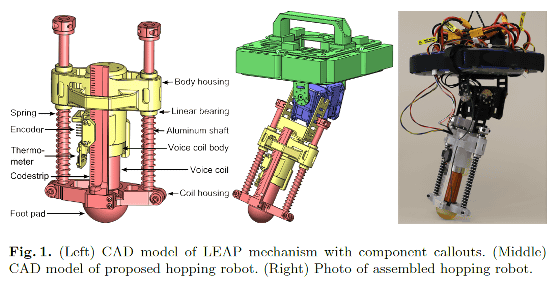
机器人是由一个弹簧驱动腿和轻量级的身体。设计是在上周透露的迪斯尼研究,详细的在这纸,“脱缰的单腿跳跃在3 d并行使用线性弹性致动器(跳跃)。”
机器人的身体只占约三分之二的机器人的总重量。这个比例远远低于大多数“漏斗”机器人躯干,因此使机器人可以由锂聚合物电池(唇),而不是典型的电力电缆。(在上图中看到的电线被用于数据收集的目的,而不需要运动。他们不提供电力机器人。)
图片来源:迪斯尼的研究。
除了轻量级唇电池,躯干是惯性传感器和微机组成的。传感器估计速度和微机使用一个修改雷伯特跳算法来保持机器人的平衡。
机器人的腿利用两个压缩弹簧支持大部分的重量,和音圈致动器弹簧装置。金宝app音圈致动器是线圈的类型中发现的常见音频扬声器。这些组件包括跳跃机制的详细研究论文。
仿真在机器人设计的作用
仿真中起到了至关重要的作用在该系统的设计。项目由Zachary棉絮、Joohyung金和Katsu Yamane开始之前作为计算机仿真在硬件中实现的。CAD模型导入Simscape多体创建模型。
根据研究小组”,我们首先开发了一个模拟测试、优化和调试我们的状态估计和控制器在实现硬件。确定一个最优的弹簧刚度最大化跳跃高度,我们模拟系统刚度,假设一系列的阻尼系数(0%、5%和10%的临界阻尼)。”
团队执行硬件实验确定系统参数和验证机电模型。这包括电流传感器校准,确定分离静摩擦力的线性轴承、各种弹簧刚度和测试硬件。通过这些测试,他们发现了有关系统参数和显示,捕获的原始模型的一般行为的物理系统。
你将看到这个机器人跳跃在迪斯尼世界吗?
迪斯尼研究的使命是“推动创新的科技前沿的华特迪士尼公司。“虽然不太可能,你会看到这个机器人很快在迪斯尼世界,当研究小组描述他们的研究的动机他们说腿机器人”可以克服不平坦的地形,和可以娱乐观众当他们表现出复杂的运动。”
独腿机器人可以作为一个简化的运动控制算法实验平台,他们还必须承受重要力量驱动来实现安全的地面间隙。对于研究人员来说,这pogobot将提供“理想基准执行机构用于步态运动。”
更多地了解这个项目,看看这个视频的机器人。





评论
留下你的评论,请点击在这里MathWorks账户登录或创建一个新的。