 克利夫角:克利夫莫勒的数学和计算
克利夫角:克利夫莫勒的数学和计算 MATLAB博客
MATLAB博客 用MATLAB进行图像处理
用MATLAB进行图像处理 Simulin金宝appk上的Guy
Simulin金宝appk上的Guy 人工智能
人工智能 开发区域
开发区域 Stuart的MATLAB视频
Stuart的MATLAB视频 头条新闻背后
头条新闻背后 本周文件交换选择
本周文件交换选择 汉斯谈物联网
汉斯谈物联网 学生休息室
学生休息室 MATLAB社区
MATLAB社区 Matlabユザコミュニティ
Matlabユザコミュニティ 创业公司、加速器和企业家
创业公司、加速器和企业家 自治系统
自治系统成像算法让你看到周围的角落与激光脉冲
斯坦福大学的新型激光成像技术可以将汽车盲点检测提升到一个全新的水平。它不仅能看到驾驶员在驾驶座上看不到的东西,还能看到从汽车上任何地方都看不到的东西。它“看到”不在视线范围内的东西。
盲点检测依靠安装在汽车周围的传感器来检测位于驾驶员一侧和车辆后面的物体。斯坦福大学的系统可以探测到隐藏在墙后和角落里的3D物体。系统使用一个算法,由MATLAB,通过计算重建隐藏在视图中的对象。
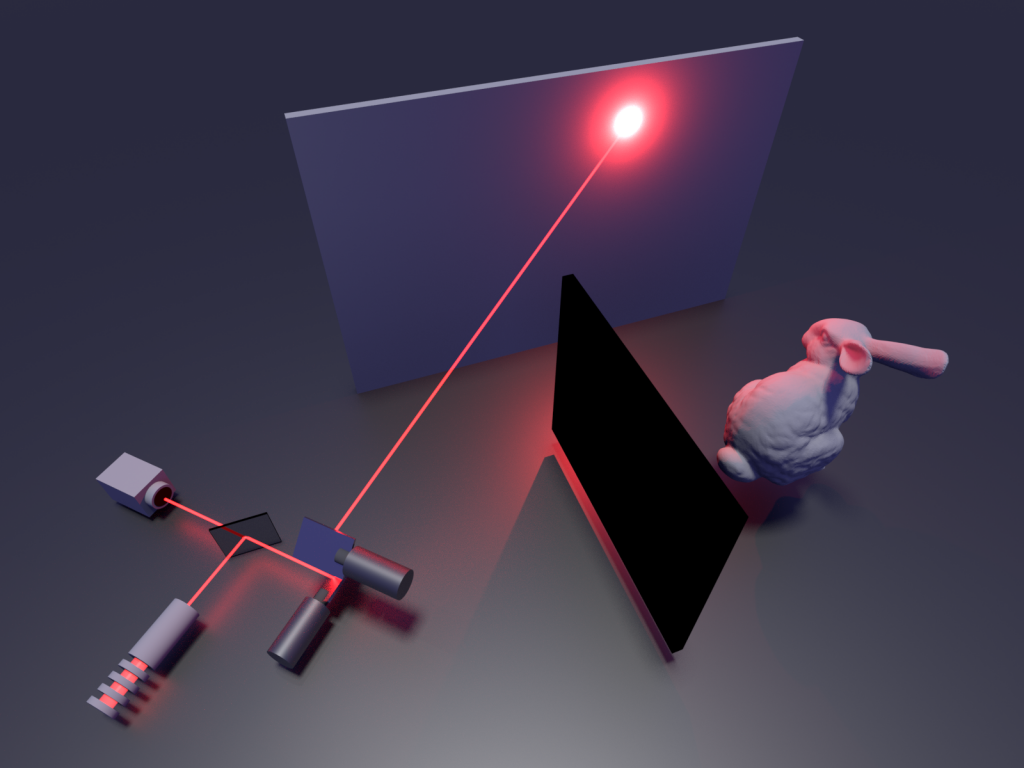
实验设置:成像系统记录激光从墙壁散射,反射到隐藏的兔子,并返回墙壁所需的时间。通过获取激光在壁面上不同位置的定时测量值,可以重建隐藏物体的三维几何形状。图片来源:斯坦福计算成像实验室。
斯坦福大学的系统甚至超越了自动驾驶汽车中使用的最先进的激光雷达。激光雷达系统将光脉冲发送到周围环境,测量光从一个物体反弹到汽车上的传感器需要多长时间。根据这些信息,激光雷达系统计算出车辆路径上物体的3D形状,区分其他车辆、路标和行人。但是激光雷达仍然需要视线条件。
室外实验:非视距成像在室外进行演示。成像系统在间接阳光下捕捉测量结果,并稳健地重建隐藏的“S”形。图片来源:斯坦福计算成像实验室。
斯坦福大学的成像技术类似于激光雷达,使用激光脉冲。但它也能捕捉从墙上散射下来的光线,并反射到隐藏在视线之外的物体上。它基本上把墙当做镜子。由于墙壁不像镜子那样反射光线,研究小组通过墙壁反射回传感器的有限光子来重建图像。
这些光子被设置在激光旁边的光子探测器捕获。光子探测器非常灵敏,可以探测到单个光子。它产生了一个“扫描”反射光脉冲。
斯坦福大学电气工程助理教授戈登·韦茨斯坦(Gordon Wetzstein)说:“我们最多只记录了几个光子,它们不像我们试图恢复的场景的形状。”“所以,我们需要建立计算重建方法来尝试解决这些形状。”
该图像显示了重建前扫描的反射光子以及重建结果。图片来源:斯坦福计算成像实验室。
计算重建算法使用来自扫描的信息来推断隐藏物体的三维形状。根据斯坦福大学新闻“一旦扫描完成,算法就会解开捕捉到的光子的路径,就像犯罪电视节目中神秘的增强技术一样,模糊的斑点会以更清晰的形式出现。”
现实世界的应用程序
斯坦福大学博士生David Lindell解释说:“我们的算法的一个好处是它与现有的扫描激光雷达系统兼容。”
该系统能够看到隐藏在墙后的路牌。这对自动驾驶汽车来说很有价值。但更重要的是,它可以在孩子或宠物进入视线之前,就看到他们什么时候要冲进车流中。
图片来源:斯坦福计算成像实验室。
该论文的作者指出,该算法在车辆上的用途超出了激光雷达系统。潜在的用途多种多样,从搜索和救援,看到隐藏在树冠树叶中的受害者,到使显微镜能够看到视野中被较大物体遮挡的物体。
斯坦福大学成像技术博士后马修·奥图尔(Matthew O ' toole)说:“为了使‘转角成像’在现实场景中可行,我们仍然需要缩短手术的采集时间。”“我们目前的原型需要几分钟来收集足够的光子来重建隐藏在视线之外的物体的图像。有了更好的硬件,比如更亮的激光器,我们相信这可以在几分之一秒内完成。”
MATLAB代码和数据可用在这里.
要了解更多关于这项研究的信息,请查看这个视频:






评论
如欲留言,请点击在这里登录您的MathWorks帐户或创建一个新帐户。