 克里夫的角落:克里夫硅藻土在数学和计算
克里夫的角落:克里夫硅藻土在数学和计算 MATLAB的博客
MATLAB的博客 史蒂夫与MATLAB图像处理
史蒂夫与MATLAB图像处理 人在仿真软件金宝app
人在仿真软件金宝app 人工智能
人工智能 开发区域
开发区域 斯图尔特的MATLAB视频
斯图尔特的MATLAB视频 在标题后面
在标题后面 文件交换的选择
文件交换的选择 汉斯在物联网
汉斯在物联网 学生休息室
学生休息室 MATLAB社区
MATLAB社区 MATLABユーザーコミュニティー
MATLABユーザーコミュニティー 创业、加速器,和企业家
创业、加速器,和企业家 自治系统
自治系统成像算法让你看到与激光脉冲在角落
斯坦福大学的新激光成像技术可以盲点检测汽车到一个全新的水平。它不仅能看到事物司机看不到从司机的位置,它可以在任何地方看到那些不可见的汽车。“看到”的东西,不在视线。
盲点检测依赖于传感器安装在汽车检测对象位于驾驶座和后面的车辆。斯坦福大学的系统可以检测对象,在3 d,隐藏在墙壁和转弯。系统使用一个算法,创建MATLAB,计算重构对象隐藏。
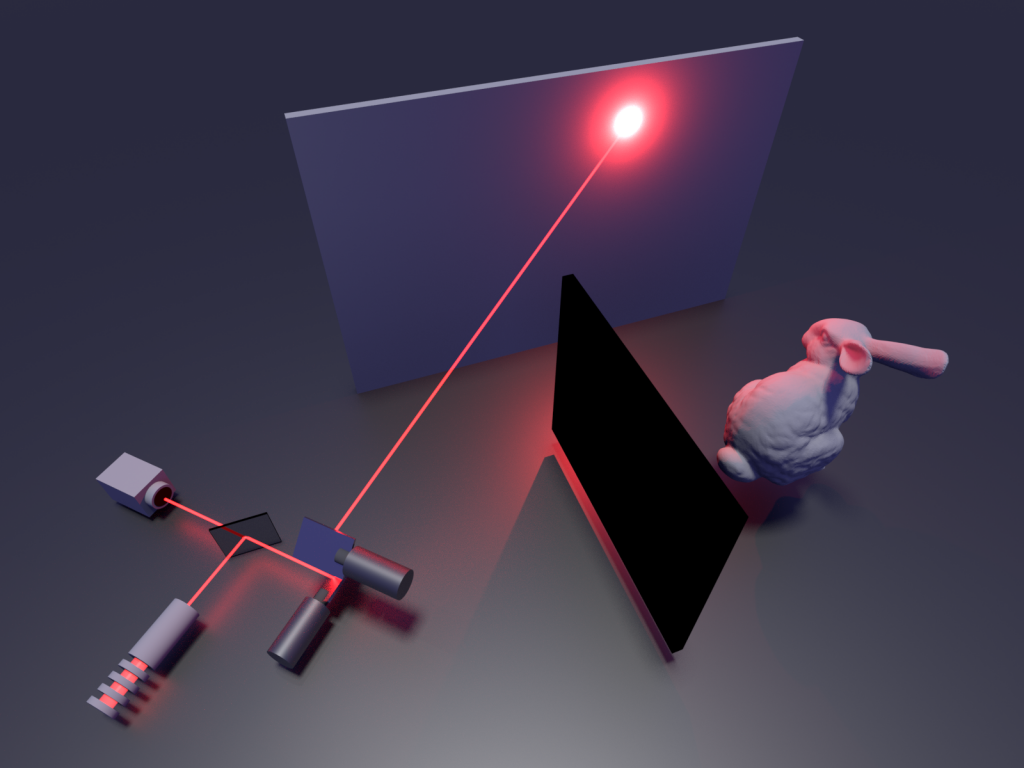
实验设置:成像系统记录时间激光散射从墙上取下来,反映隐藏的兔子,并返回到墙上。通过收购这些时间为不同的激光测量位置在墙上,隐藏的物体的三维几何重建。图片来源:斯坦福大学计算成像实验室。
斯坦福大学的系统甚至超出了最先进的激光雷达用于自主车辆。激光雷达系统发送脉冲的光环境,测量需要多长时间光物体反弹回到汽车上的传感器。从这个信息,激光雷达系统计算物体的三维形状的路径,区分其他车辆、道路标志和行人。但激光雷达仍然需要视距条件。
室外实验:视线外成像户外演示了。间接的阳光和强劲的成像系统捕获测量可以隐藏的“S”形。图片来源:斯坦福大学计算成像实验室。
斯坦福成像技术与激光雷达类似,使用脉冲激光。但也从墙上捕捉光散射和反射的对象视图隐藏。它基本上把墙当作一面镜子。因为墙壁不反射光线和一面镜子,球队重建图像数量有限的光子反射回传感器的墙。
这些光子捕获的光子探测器设置相邻激光。光子探测器很敏感,它可以检测单个光子。它创建了一个“扫描”反射的光脉冲。
“最多,几个光子我们录音,他们不像我们试图恢复场景的形状,”戈登Wetzstein说,斯坦福大学电气工程助理教授。“因此,我们需要建立计算重建方法试图解决这些形状。”
这张图片显示了扫描反射光子之前重建以及重建结果。图片来源:斯坦福大学计算成像实验室。
从扫描计算重建算法使用信息来推断的3 d形状隐藏对象。根据斯坦福大学新闻一旦扫描完成,该算法使捕获的光子的路径,就像神话中的增强技术犯罪电视节目,模糊的斑点的形式更为严重。”
现实世界的应用程序
“我们的算法的一个好处是,它是兼容现有扫描激光雷达系统,”大卫Lindell解释说,斯坦福大学博士生。
系统能够看到一个路标,隐藏在墙上。这将是宝贵的一个自治车辆。但是更加重要,它可以看到当一个孩子或宠物即将飞镖到交通,甚至在它进入视线。
图片来源:斯坦福大学计算成像实验室。
论文的作者注意到,该算法在车辆使用超出激光雷达系统。可能使用不同的搜索和营救受害者被树树冠枝叶,使显微镜可以看到对象被更大的项目领域的观点。
使成像在角落的可行的对于现实世界的场景,我们仍然需要缩短程序的采集时间,”马修·奥图尔说,斯坦福大学博士后成像技术。“我们目前的原型需要几分钟来收集足够的光子重建的图像对象隐藏在视线之外。有更好的硬件如光明的激光,我们相信可以在几分之一秒。”
MATLAB代码和数据是可用的在这里。
了解更多的研究,看看这个视频:







评论
留下你的评论,请点击在这里MathWorks账户登录或创建一个新的。