 克利夫的角落:克莱夫·莫勒(Cleve Moler)在数学和计算上
克利夫的角落:克莱夫·莫勒(Cleve Moler)在数学和计算上 MATLAB博客
MATLAB博客 Steve on Image Processing with MATLAB
Steve on Image Processing with MATLAB 家伙在simu金宝applink上
家伙在simu金宝applink上 深度学习
深度学习 开发人员区
开发人员区 Stuart’s MATLAB Videos
Stuart’s MATLAB Videos Behind the Headlines
Behind the Headlines File Exchange Pick of the Week
File Exchange Pick of the Week 汉斯在物联网上
汉斯在物联网上 学生休息室
学生休息室 MATLAB社区
MATLAB社区 matlabユーザーコミュニティー
matlabユーザーコミュニティー 初创企业,加速器和企业家
初创企业,加速器和企业家Mission On Mars Robot Challenge 2015 – France
将要's pick this week is2015年火星机器人挑战赛的任务 - 法国byPascale Naillard。
Pascale works in the MathWorks Paris office and helped coordinate a student competition: the火星机器人挑战的任务。目的是设计一种算法,该算法将驱动漫游者在避免障碍的同时,尽快到达兴趣点。虽然在火星表面上登上一群流浪者会很有趣,但决赛在里昂在地形模型中举行。
Of course before you test in the field, the prudent thing to do is to fine-tune your design in simulation first. MathWorks provided competitors with a starter model in Simulink. As I would expect from any of my coworkers, this model is very well organized and follows many modeling best practices. All the files are managed as a金宝app仿真软件项目,这使得很容易共享和让其他人快速使用它。加载项目并打开主要模型后,这就是您发现的:
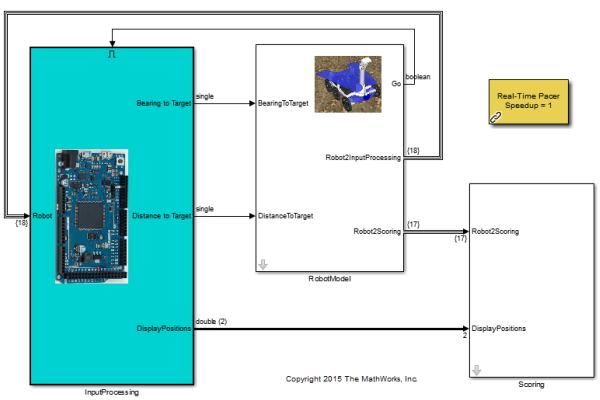
The model is comprised on a subsystem that models the rover's control system, dynamics, and sensors. A separate subsystem scores the rover's performance. These subsystems served as a foundation that enabled competition teams to improve on the third subsystem: InputProcessing. In effect, this was the guidance algorithm to the rover's software.
The guidance algorithm for the rover is managed by aStateflowchart, which contains a state machine that defines the pathing logic. If you're unfamiliar with state machines, we produced a技术谈话系列on the subject that's worth checking out (I hear the presenter is phenomenal). In a nutshell, state machines are a useful way of expressing a system with different modes of operation that you switch between. When you use Stateflow to design your state machine, you can visualize the mode switching as you simulate:
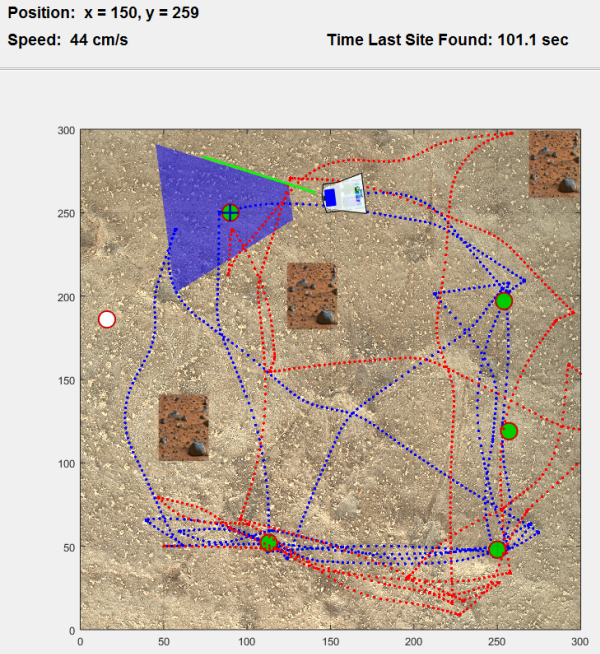
While this looks pretty, the state machine employs an intentionally poor algorithm. This is a sample of a simulated three-minute attempt to locate all points of interest (marked as circles). The rover doesn't know where the circles are; it has to scan for them with a camera whose range of visibility is shown with the blue trapezoid.
As you can see in the animation, there's no strategy employed to systematically sweep through the field and find points of interest. The rover randomly spins around, moves forward on occasion, and (if it's lucky) finds a circle. Even when that happens, it sometimes loses track of what it detected. The animation shows a case were it identified a point but then drove right past it. The end result of the three minutes is unimpressive. The rover wastes a lot of time covering the same ground and ultimately misses one of the six points of interest.
Think you could design a better algorithm? Well that was the point of the competition. And even though the challenge is over, this is still a fun model to play around with.
注释
让我们知道您的想法这里or leave acommentfor Pascale.
Pascale works in the MathWorks Paris office and helped coordinate a student competition: the火星机器人挑战的任务。目的是设计一种算法,该算法将驱动漫游者在避免障碍的同时,尽快到达兴趣点。虽然在火星表面上登上一群流浪者会很有趣,但决赛在里昂在地形模型中举行。
Of course before you test in the field, the prudent thing to do is to fine-tune your design in simulation first. MathWorks provided competitors with a starter model in Simulink. As I would expect from any of my coworkers, this model is very well organized and follows many modeling best practices. All the files are managed as a金宝app仿真软件项目,这使得很容易共享和让其他人快速使用它。加载项目并打开主要模型后,这就是您发现的:

The model is comprised on a subsystem that models the rover's control system, dynamics, and sensors. A separate subsystem scores the rover's performance. These subsystems served as a foundation that enabled competition teams to improve on the third subsystem: InputProcessing. In effect, this was the guidance algorithm to the rover's software.
The guidance algorithm for the rover is managed by aStateflowchart, which contains a state machine that defines the pathing logic. If you're unfamiliar with state machines, we produced a技术谈话系列on the subject that's worth checking out (I hear the presenter is phenomenal). In a nutshell, state machines are a useful way of expressing a system with different modes of operation that you switch between. When you use Stateflow to design your state machine, you can visualize the mode switching as you simulate:

While this looks pretty, the state machine employs an intentionally poor algorithm. This is a sample of a simulated three-minute attempt to locate all points of interest (marked as circles). The rover doesn't know where the circles are; it has to scan for them with a camera whose range of visibility is shown with the blue trapezoid.

As you can see in the animation, there's no strategy employed to systematically sweep through the field and find points of interest. The rover randomly spins around, moves forward on occasion, and (if it's lucky) finds a circle. Even when that happens, it sometimes loses track of what it detected. The animation shows a case were it identified a point but then drove right past it. The end result of the three minutes is unimpressive. The rover wastes a lot of time covering the same ground and ultimately misses one of the six points of interest.

Think you could design a better algorithm? Well that was the point of the competition. And even though the challenge is over, this is still a fun model to play around with.
注释
让我们知道您的想法这里or leave acommentfor Pascale.







コメント
コメントを残すには、ここMATHWORKSアカウントアカウントアカウントアカウントサインインするするか新しい新しい新しい新しいアカウントアカウントアカウントアカウント作成作成。。。