 克利夫角:克利夫·莫尔谈数学和计算机
克利夫角:克利夫·莫尔谈数学和计算机 洛伦谈MATLAB的艺术
洛伦谈MATLAB的艺术 MATLAB在图像处理中的应用
MATLAB在图像处理中的应用 人在仿真软件金宝app
人在仿真软件金宝app 深度学习
深度学习 开发区域
开发区域 斯图尔特的MATLAB视频
斯图尔特的MATLAB视频 标题背后
标题背后 本周最佳文件交换选择
本周最佳文件交换选择 汉斯在物联网
汉斯在物联网 学生休息室
学生休息室 初创企业、加速器和企业家
初创企业、加速器和企业家 MATLAB社区
MATLAB社区 MATLABユーザーコミュニティー
MATLABユーザーコミュニティー2015年火星任务机器人挑战赛-法国
将本周的选择是2015年火星任务机器人挑战赛-法国通过帕斯卡尔指甲油.
帕斯卡尔在MathWorks巴黎办公室工作,并帮助协调一项学生竞赛:the火星任务机器人挑战.他们的目标是设计一种算法,能够在避开障碍物的同时,尽可能快地驱动探测器到达感兴趣的地点。虽然让一队探测车在火星表面着陆会很有趣,但决赛是在里昂的一个地形模型中举行的。
当然,在实地测试之前,谨慎的做法是首先在模拟中对设计进行微调。MathWorks在Simulink中为竞争对手提供了入门模型。正如我的同事所期望的,这个模型组织得非常好,并且遵循了许多建模最佳实践。所有文件都作为一个整体进行管理金宝app金宝appSimulink项目,这使得它很容易分享并让其他人快速使用它。当你加载项目并打开主模型时,你会发现:
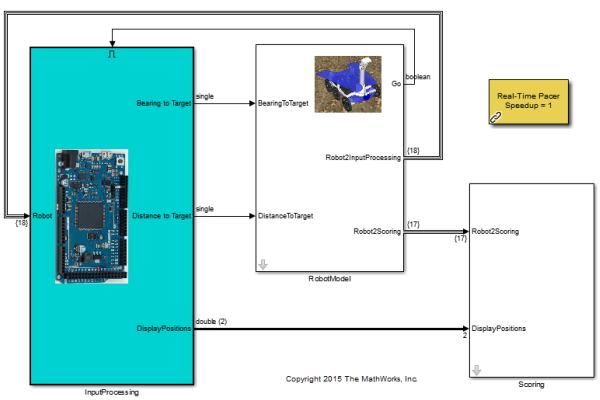
该模型由一个子系统组成,该子系统对月球车的控制系统、动力学和传感器进行建模。一个单独的子系统为月球车的性能评分。这些子系统作为一个基础,使竞争团队能够在第三个子系统上改进:InputProcessing。实际上,这是月球车软件的制导算法。
探测车的制导算法由状态流图表,其中包含定义路径逻辑的状态机。如果你不熟悉状态机,我们生产了一个技术演讲系列关于值得一看的主题(我听说演讲者是非凡的)。简而言之,状态机是一种非常有用的方式,可以用不同的操作模式来表示系统。使用Stateflow设计状态机时,可以在模拟时可视化模式切换:
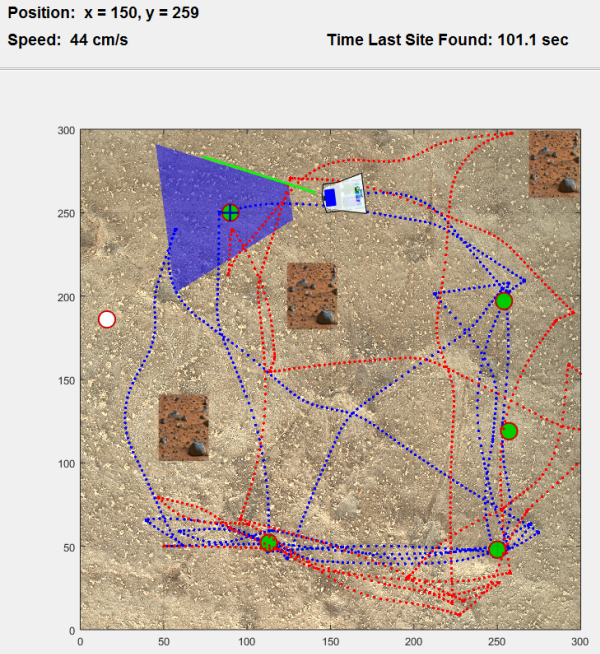
虽然这看起来很不错,但状态机却故意使用了一个糟糕的算法。这是一个模拟三分钟尝试定位所有关注点(标记为圆圈)的示例。漫游者不知道圆圈在哪里;它必须用一个可视范围用蓝色梯形显示的摄像机扫描它们。
正如您在动画中所看到的,没有使用任何策略来系统地扫描整个领域并找到感兴趣的点。漫游者随机旋转,偶尔向前移动,然后(如果幸运的话)找到一个圆圈。即使在这种情况下,它有时也会丢失检测到的信息。动画显示了一个案例,它识别出一个点,然后直接驶过该点。三分钟的最终结果并不令人印象深刻。漫游者在同一场地上浪费了大量时间,最终错过了六个关注点中的一个。
你觉得你能设计出更好的算法吗?这就是比赛的重点。尽管挑战已经结束,但这仍然是一个有趣的模式。
评论
让我们知道你的想法在这里或者留下议论帕斯卡尔。
帕斯卡尔在MathWorks巴黎办公室工作,并帮助协调一项学生竞赛:the火星任务机器人挑战.他们的目标是设计一种算法,能够在避开障碍物的同时,尽可能快地驱动探测器到达感兴趣的地点。虽然让一队探测车在火星表面着陆会很有趣,但决赛是在里昂的一个地形模型中举行的。
当然,在实地测试之前,谨慎的做法是首先在模拟中对设计进行微调。MathWorks在Simulink中为竞争对手提供了入门模型。正如我的同事所期望的,这个模型组织得非常好,并且遵循了许多建模最佳实践。所有文件都作为一个整体进行管理金宝app金宝appSimulink项目,这使得它很容易分享并让其他人快速使用它。当你加载项目并打开主模型时,你会发现:

该模型由一个子系统组成,该子系统对月球车的控制系统、动力学和传感器进行建模。一个单独的子系统为月球车的性能评分。这些子系统作为一个基础,使竞争团队能够在第三个子系统上改进:InputProcessing。实际上,这是月球车软件的制导算法。
探测车的制导算法由状态流图表,其中包含定义路径逻辑的状态机。如果你不熟悉状态机,我们生产了一个技术演讲系列关于值得一看的主题(我听说演讲者是非凡的)。简而言之,状态机是一种非常有用的方式,可以用不同的操作模式来表示系统。使用Stateflow设计状态机时,可以在模拟时可视化模式切换:

虽然这看起来很不错,但状态机却故意使用了一个糟糕的算法。这是一个模拟三分钟尝试定位所有关注点(标记为圆圈)的示例。漫游者不知道圆圈在哪里;它必须用一个可视范围用蓝色梯形显示的摄像机扫描它们。

正如您在动画中所看到的,没有使用任何策略来系统地扫描整个领域并找到感兴趣的点。漫游者随机旋转,偶尔向前移动,然后(如果幸运的话)找到一个圆圈。即使在这种情况下,它有时也会丢失检测到的信息。动画显示了一个案例,它识别出一个点,然后直接驶过该点。三分钟的最终结果并不令人印象深刻。漫游者在同一场地上浪费了大量时间,最终错过了六个关注点中的一个。

你觉得你能设计出更好的算法吗?这就是比赛的重点。尽管挑战已经结束,但这仍然是一个有趣的模式。
评论
让我们知道你的想法在这里或者留下议论帕斯卡尔。
|







评论
如需留言,请点击在这里登录到您的MathWorks帐户或创建新帐户。