 克利夫角:克利夫莫勒的数学和计算
克利夫角:克利夫莫勒的数学和计算 MATLAB博客
MATLAB博客 用MATLAB进行图像处理
用MATLAB进行图像处理 Simulin金宝appk上的Guy
Simulin金宝appk上的Guy 人工智能
人工智能 开发区域
开发区域 Stuart的MATLAB视频
Stuart的MATLAB视频 头条新闻背后
头条新闻背后 本周文件交换选择
本周文件交换选择 汉斯谈物联网
汉斯谈物联网 学生休息室
学生休息室 MATLAB社区
MATLAB社区 Matlabユザコミュニティ
Matlabユザコミュニティ 创业公司、加速器和企业家
创业公司、加速器和企业家 自治系统
自治系统SimMechanics R2013b中的运动驱动
在R2013b中,可以指定关节运动SimMechanics第二代模型。在这篇文章中,我将使用一个具有内摩擦和重力的简单摆来突出不同的方法来驱动一个机构。
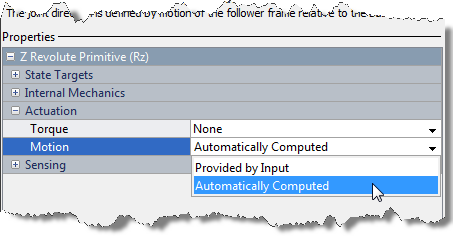
如果你看关节的对话框,比如转动关节时,您将注意到每个原语现在在驱动部分:转矩和运动.
的转矩字段提供3个选项:没有一个,Input提供和自动计算.

的运动第二场:Input提供和自动计算.
这使得每个关节原语总共有6种可能的构型。在联合驱动文档页,您可以找到所有模式的描述,其中一个联合原语可以被驱动。
被动:没有扭矩和自动计算运动
这是默认设置,其中关节原语是被动的。在我们的例子中,钟摆只是在重力的作用下下落。
向前动力学:由输入和自动计算运动指定的扭矩
为关节原语指定一个力或扭矩,发动机计算产生的运动。例如,如果我们采用与前一种情况相同的摆,并施加恒定的扭矩,它将稳定在一个角度。
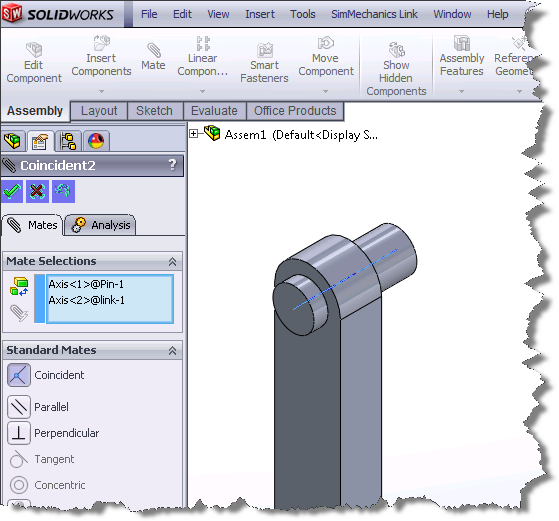
逆动力学:由输入和自动计算扭矩指定的运动
如果你知道一个关节应该如何运动,并想知道使其发生所需的扭矩或力的大小,这个模式适合你。例如,我们可以对我们的摆施加一个正弦波运动,并测量产生这个运动所需的扭矩:
需要注意的一件重要的事情是,当指定关节原语的运动时,位置、速度和加速度必须指定。为了帮助解决这个问题金宝appSimulink-PS转换器给出了过滤所需运动的可能性,并在内部计算输入信号的一阶导数和二阶导数。
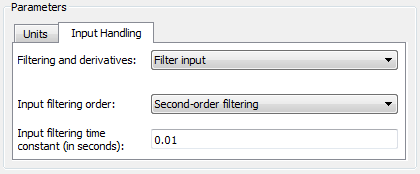
***注意:默认情况下,Simulink-PS转换器块中的时间常数为1e-3s。金宝app这个值适用于大多数Simscape域,但是对于许多SimMechanics模型,将它增加到1e-2s可以加快模拟速度,而不会显著影响结果。
如果过滤不适合您的应用程序,您可以始终关闭它,并手动向Simulink-PS转换器提供位置、速度和加速度。金宝app
间接逆动力学
这种模式在SimMechanics第一代中是不存在的,所以我决定创造这种表达间接逆动力学来描述它。因为它是这样的逆动力学时,用户指定机构的运动。但是这个术语间接意味着SimMechanics自动计算并应用必要的力和/或扭矩,以使用关节原语产生运动,而不是使用指定的运动原语。
如果我们继续同样的例子,我们可以使用a的y轴平动原语平面关节指定钟摆末端的平动。然后SimMechanics可以计算出在钟摆底座上产生该运动所需的扭矩。
***请注意,我在以前的模型中包括一个焊接接头。在R2013b中,SimMechanics Second Generation有一个约束,每个运动学环必须包含至少一个无运动驱动且无计算扭矩的关节。
间接逆动力学…加上外力
最后一个可用的组合是前一个组合的扩展。除了指定运动之外,还可以添加一个额外的扰动力或扭矩。
现在轮到你了
在SimMechanics R2013b中尝试新的运动驱动,让我们知道你的想法这里的评论.






评论
如欲留言,请点击在这里登录您的MathWorks帐户或创建一个新帐户。