 克莱夫之角:克莱夫·莫勒谈数学与计算
克莱夫之角:克莱夫·莫勒谈数学与计算 MATLAB博客
MATLAB博客 史蒂夫的图像处理与MATLAB
史蒂夫的图像处理与MATLAB Simulin金宝appk上的家伙
Simulin金宝appk上的家伙 人工智能
人工智能 开发区域
开发区域 Stuart的MATLAB视频
Stuart的MATLAB视频 头条背后
头条背后 文件交换选择的一周
文件交换选择的一周 汉斯谈物联网
汉斯谈物联网 学生休息室
学生休息室 MATLAB社区
MATLAB社区 Matlab
Matlab 创业公司、加速器和企业家
创业公司、加速器和企业家 自治系统
自治系统Arduino工程工具包
你听说过吗Arduino工程工具包?
如果你感兴趣的话DIY项目和正在寻找一种有趣的方式来应用一些控制和机器人原理到一个真实的系统,你可能想要阅读这篇文章。
介绍
如果你关注这个博客有一段时间了,你可能知道我喜欢在家里用MATLAB和Simulink做各种项目。金宝app例如,参见我的真空烹调机立柱。
当我听说Arduino现在提供Arduino工程工具包,并且我们有支持包可以用Simulink编程时,我联系了制作它的团队,问我是否可以借一个来玩一下。金宝app金宝app
当你买套件上Arduino Store,你会收到一个装满机械和电子部件的盒子,其中包括一个Arduino MKR1000:

该工具包包括建造三个可能项目的说明:摩托车,漫游者或绘图机器人。
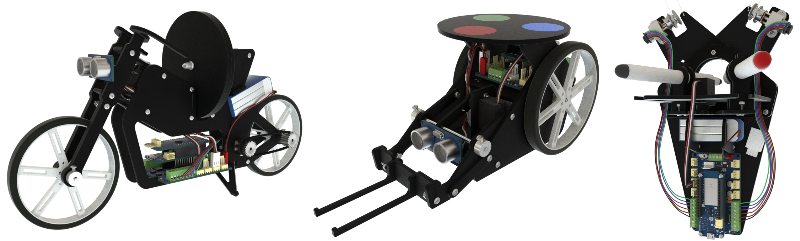
我决定买摩托车。我认为惯性轮使它自平衡将是一个有趣的控制项目。
开始
一旦您将工具包拼凑在一起,您将需要在MATLAB中安装几个软件包:
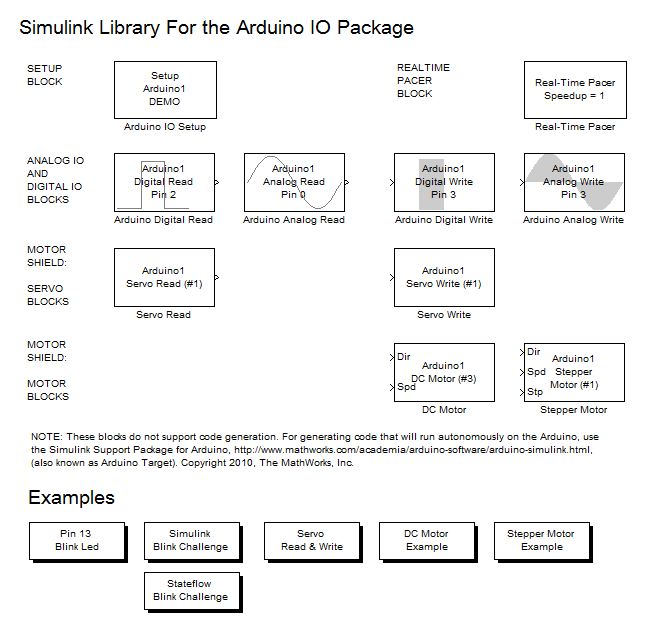
- 金宝appArdu金宝appino硬件的Simulink支持包:这是在Arduino系列板上部署Simulink模型所需的基本包。金宝app
- Arduino工程工具包硬件支持金宝app:本包包含所有传感器和执行器的驱动器和示例模型。
- Arduino工程工具包项目文件:此包包含特定于三个项目的Simulink模型,金宝app用于模拟系统和在硬件上部署。
最简单的安装方法是通过附加组件菜单。
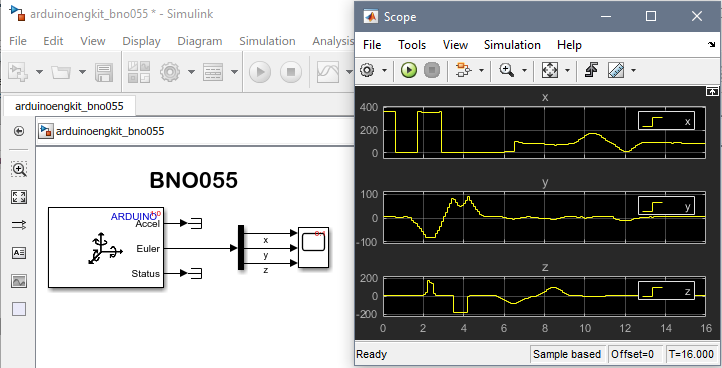
安装完这三个软件包后,我进入例子Arduino工程套件硬件支持包的文件夹,并逐一尝试示例,以确保我能够利用所有的传感器和执行器金宝app。例如,这是我对IMU的测试,我将摩托车沿所有轴前后倾斜90度。这让我得出结论,我想控制的轴,摩托车的横摇角,是欧拉角输出的第二个元素,Y轴。
我的模型
工程套件项目文件还包含一个完整的模型,平衡摩托车,并允许您控制其速度和转向角度。然而,我认为从头开始构建我的会更有趣。如果你感兴趣,你可以在这里下载最终版本。
这是最终结果的顶层图。
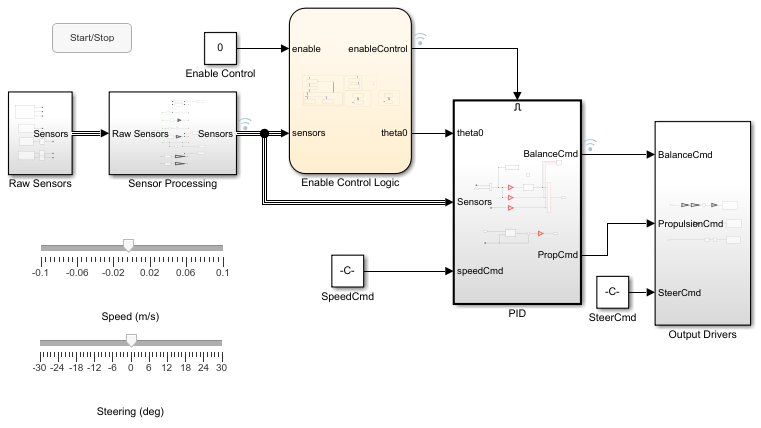
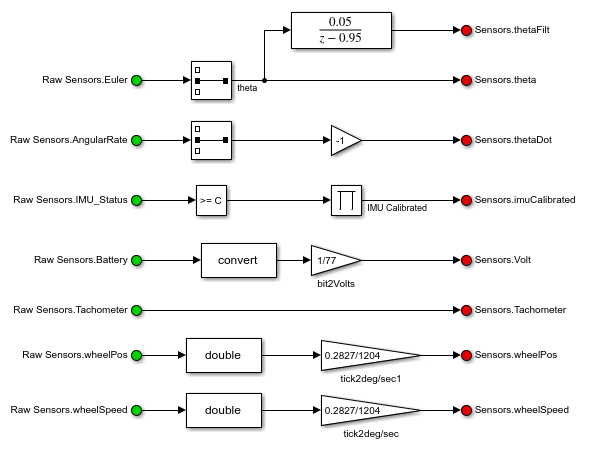
让我们看看每一个组成部分。首先,在左边,我创建了一个子系统,其中包含我需要的所有传感器,并将它们组合在一个总线中。
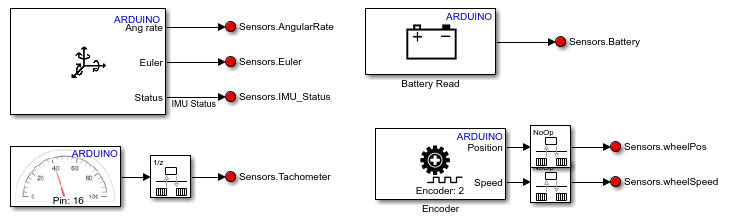
然后对每个传感器进行处理,以方便的工程单元提取相关数据。
现在是时候让状态流图充当模型的大脑了。在左边,我检查了三个条件:IMU是校准的,摩托车没有摔倒,飞轮没有达到最大速度。当所有这些条件都满足后,我就可以单击模型顶层的Start按钮。一旦点击这个,我有4秒的校准,在我开始平衡之前,我把摩托车完全垂直校准。如果摩托车摔倒了,我可以再次按下按钮重置控制器,再试一次。
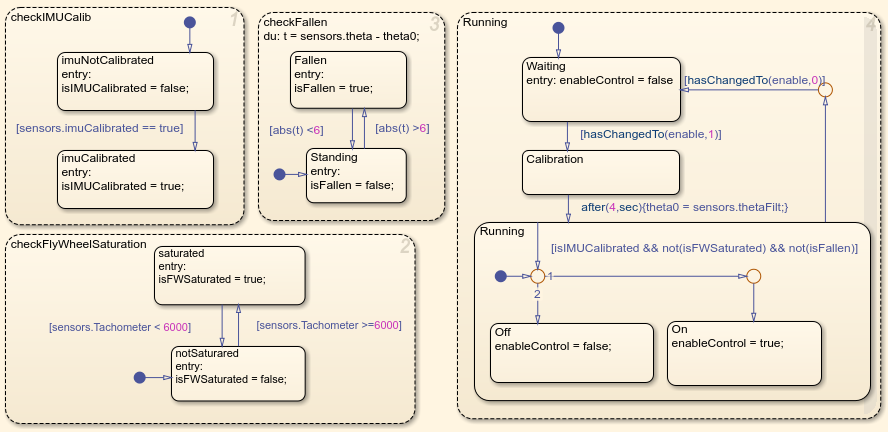
当图表启用平衡时,它会打开激活控制器的Enabled子系统。对于平衡飞轮,控制器是一个PID,以摩托车的横摇角为输入,对飞轮产生电压指令。对于摩托车的速度,这是一个简单的比例控制器,它将摩托车的速度作为输入,将其集成并与轮式编码器进行比较。
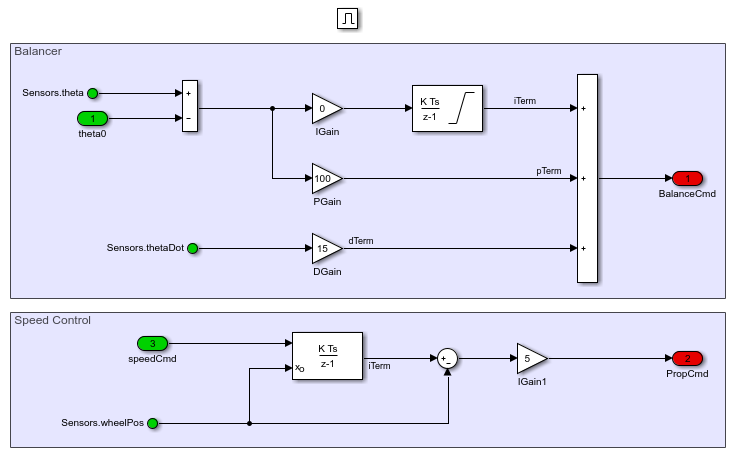
注意,这个平衡控制器并不完美。飞轮电机上的传感器不允许直接测量飞轮速度,使得难以完美地控制飞轮运动。我们正在努力!
最后,控制器的输出被发送到输出驱动程序块。
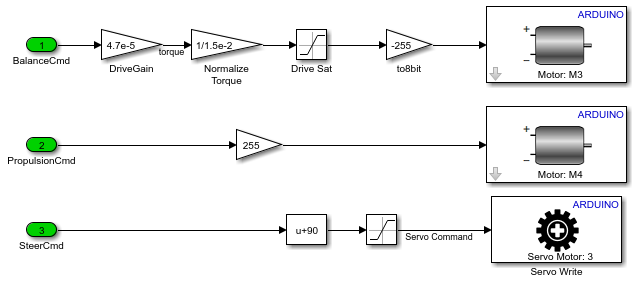
而且很有效!
这是一段展示摩托车运行的视频:
参观Arduino Engineering Kit YouTube频道查看更多示例。
现在轮到你了
请在下面的评论中告诉我们您对Arduino Engineering Kit的看法。






评论
如欲留言,请点击在这里登录您的MathWorks帐户或创建一个新帐户。