 克利夫角:克利夫莫勒的数学和计算
克利夫角:克利夫莫勒的数学和计算 MATLAB博客
MATLAB博客 用MATLAB进行图像处理
用MATLAB进行图像处理 Simulin金宝appk上的Guy
Simulin金宝appk上的Guy 人工智能
人工智能 开发区域
开发区域 Stuart的MATLAB视频
Stuart的MATLAB视频 头条新闻背后
头条新闻背后 本周文件交换选择
本周文件交换选择 汉斯谈物联网
汉斯谈物联网 学生休息室
学生休息室 MATLAB社区
MATLAB社区 Matlabユザコミュニティ
Matlabユザコミュニティ 创业公司、加速器和企业家
创业公司、加速器和企业家 自治系统
自治系统
使用Simscape多体向目标投掷对象
今天的嘉宾帖子来自转向Alakshendra。Veer将分享一个Simscape - Simulink建模和控制工金宝app作流程的气动执行器投掷一个球的目标。
- - - - - - - - - - - -
过去几年,我一直在跟踪RoboCon非常密切。幸运的是,今年我有机会在2018年全国机器人大赛RoboCon上观看了真人表演。和往年一样,今年的主题也有了对象和目标。学生们想出了新的创新设计来完成任务,大多数团队使用气动执行器将球扔向目标。然而,如何选择合适的气动元件和设计抛掷机构是一个挑战。此外,直接控制物体的轨迹是不可能的,因为一旦它在空中,就没有执行器来指导物体的投射运动到目标。因此,在学生的激励下,为了回答一些潜在的问题,我们想建立一个模拟环境,帮助学生完成任务。
找到此处描述的所有模型《MATLAB中央文件交换》气动机器人执行器建模”。此外,我们还制作了教学视频,链接在文章的末尾。
投掷机制实现使用Simscape多体
我们回到我们的工作场所,就像一个本科RoboCon参与者一样,我们首先在一张纸上画了一个简单的投掷机构。接下来,完成整个设计Simscape多体为三维机械系统提供了一个多体仿真环境。

构建好之后,我们在模拟环境中尝试了一些很酷的东西:
- 调整尺寸:我们通过改变设计尺寸尝试了多次模拟。例如,增加盒子内球的密度,证明盒子的下表面无法承受球的载荷。
- 想象我们的想象力:我们在模拟环境中发挥了所有的想象力。例如,如果正弦信号作为移动关节的运动输入会发生什么?
- 结合动力学:Simscape Multibody允许您了解系统的动态。人们可以改变内部力学,输入运动,输入扭矩或输入力来了解系统的运行情况。例如,如果转动关节的阻尼系数为0会发生什么?
- 参考输入信号:由于有多次失败的自由,我们尝试了无数次模拟,把球扔进黄色的盒子里。在多次失败后,我们终于找到了几个活塞运动的输入信号,使球落在黄色框中。
现在,下一个问题是直接向活塞提供所需的输入信号的可能性。当然不!我们不能这样做,因为活塞的运动是由双作用驱动器两侧的压力差产生的。因此,有必要建立并模拟一个能够提供压差信息的模型。
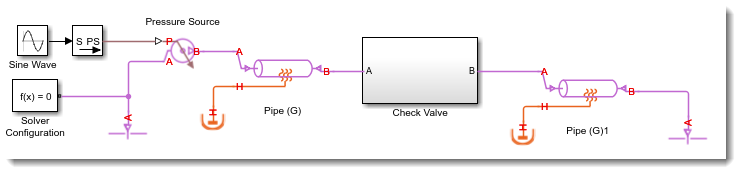
采用Simscape实现气动驱动电路
我们回到了我们在2018年全国机器人竞赛RoboCon期间做的手写笔记,我们画了一个基本的气动原理图,包括一个塑料瓶、供应管道、一个方向控制阀(DCV)和一个双作用执行器。在不做任何更改的情况下,我们简单地将完整的原理图从一张纸复制到Simscape使用物理块和模拟给了我们一些有趣的信息: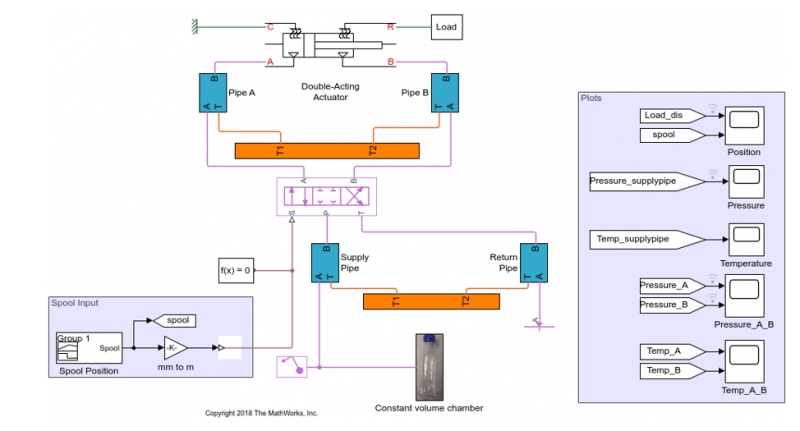
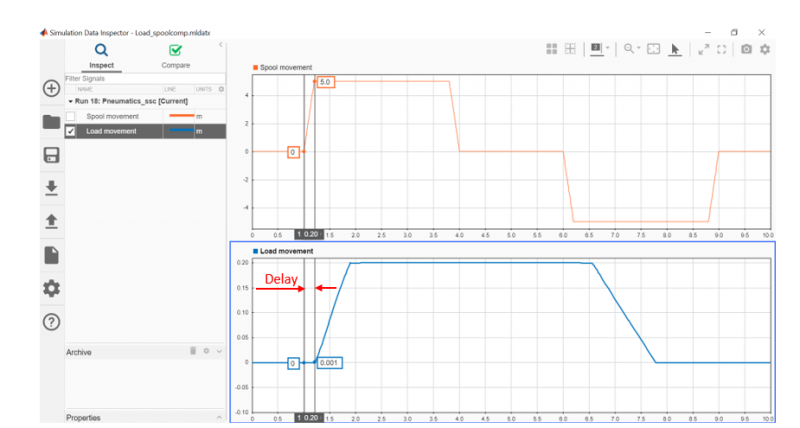
- 线轴运动:当DCV的阀芯移动时,附着在活塞上的负载的运动有一个延迟。这是因为流体需要一定的时间才能在双作用致动器两侧形成压力差。
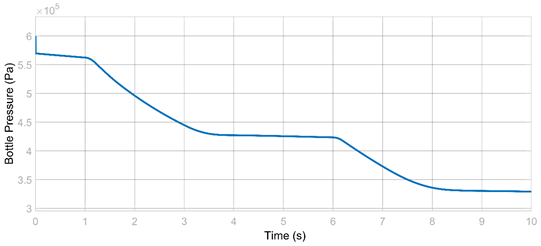
- 瓶压力:当活塞开始运动时,塑料瓶中的压力下降。
- DCV大小:直流管的尺寸对于决定气动系统中的气流方向和压力发展非常重要。即使是阀门直径的微小变化也会带来管道压力的剧烈变化。
PID控制器的实现
一旦Simscape模型准备好了,我们就将其与构建的投掷机制模型连接起来,如下图所示:
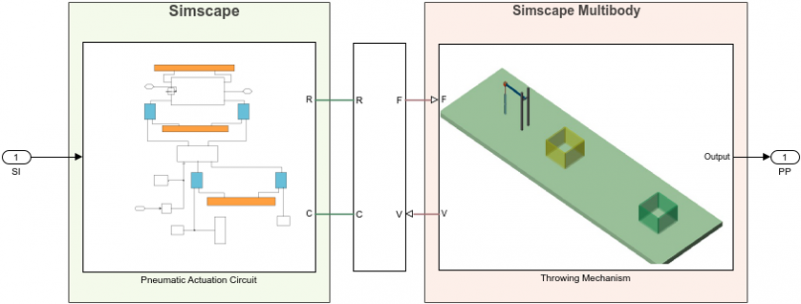
请注意,线性接口块可在Simscape多体多物理库。
然而,当我们运行仿真时,我们意识到要找到能将球扔进目标的DCV的阀芯运动所需的量并不是一件容易的任务,因为活塞运动不随DCV的阀芯运动线性变化。这是一个动画,显示30%的线轴运动,链接是无法扔球。
因此,我们使用PID控制器,其目标是跟踪参考活塞位置,并找到适当的DCV的阀芯位置。

注:参考活塞位置为抛掷机构模型得到的信号。
这是我们用PID控制器进行模拟后得到的结果。
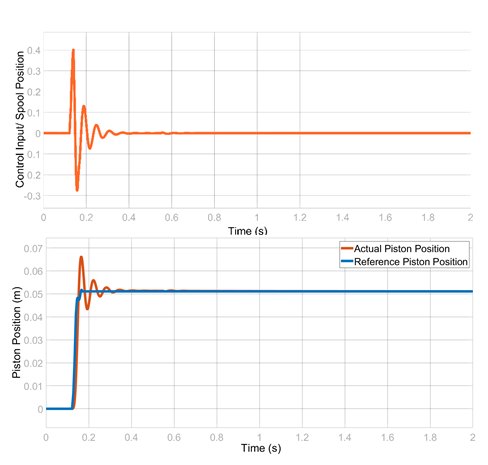
从动画和结果来看,很明显控制器成功地跟踪了参考轨迹,因此球成功地落在了黄色框中。
下一个什么?
我们有一个三部分的视频系列建模气动机器人执行器,在那里你可以找到应用方法的详细解释。
你可以找到本视频中使用的范例模型MATLAB中央文件交换。
请随时下载模型,试着把球扔进目标,并在下方发表您的评论或问题。
- カテゴリ:
- 机器人技术,
- Simscape,
- 金宝app仿真软件,
- 技能,
- 工作流






コメント
コメントを残すには,ここをクリックしてMathWorksアカウントにサインインするか新しいMathWorksアカウントを作成します。