 克里夫的角落:克里夫硅藻土在数学和计算
克里夫的角落:克里夫硅藻土在数学和计算 MATLAB的博客
MATLAB的博客 史蒂夫与MATLAB图像处理
史蒂夫与MATLAB图像处理 人在仿真软件金宝app
人在仿真软件金宝app 人工智能
人工智能 开发区域
开发区域 斯图尔特的MATLAB视频
斯图尔特的MATLAB视频 在标题后面
在标题后面 文件交换的选择
文件交换的选择 汉斯在物联网
汉斯在物联网 学生休息室
学生休息室 MATLAB社区
MATLAB社区 MATLABユーザーコミュニティー
MATLABユーザーコミュニティー 创业、加速器,和企业家
创业、加速器,和企业家 自治系统
自治系统
仿真、场景和无人驾驶,SAE AutoDrive方式
今天的嘉宾博客Ramakrishnan Akshra纳史木汗、教育技术传教士在MathWorks学生竞争的团队。她在这里谈论2020年的赢家模型SAE汽车驱动的挑战和鼓励学生参加2021年的挑战!了解更多的竞争在这里,参与团队还可以申请免费软件。
介绍
的SAE AutoDrive挑战是一个4年大学生设计大赛,8团队从U。年代和加拿大参与。高级技术三年级的竞争目标是导航自动驾驶模式的城市驾驶课程描述SAE四级。
MathWorks挑战团队使用模拟
模拟是一个非常有用的工具,自主汽车发展。基于模型的测试可以帮助算法开发、单元测试和系统级测试,和边缘的情况下测试。真实的传感器数据可以记录和回放系统来优化融合算法。一个模拟环境可以创建模型真实的环境,可以用来测试各种算法和传感器位置。最好的算法和传感器位置,实现团队需求可以选择基于性能的结果。
每年MathWorks挑战团队使用模拟通过一个模拟的挑战。这个博客将简要介绍1圣和2nd赢家的2020年挑战(多伦多大学和凯特林大学),他们的系统设计,以及他们如何使用MathWorks工具来帮助实现整体竞争目标。团队被认为基于他们如何使用工具来执行:
- 开环开环感知测试——合成数据测试,评估算法的正确性
- 闭环控制测试——闭环合成场景,评估控制算法(s)的性能
- 控制算法,生成代码的代码生成算法,将生成的代码集成到车辆
- 创新使用MathWorks工具——技术/工艺明显不同于上述3类
多伦多大学
的学生团队从多伦多大学,aUToronto,赢得1圣在挑战。
开环感知测试
这支球队的第一步是开环的合成数据感知测试。他们选择测试传感器融合算法。合成的合成数据测试,他们使用了(DSD)。这个程序允许您设计合成驾驶场景测试你的自动驾驶。更多信息创建驾驶场景和生成合成传感器数据可以找到自主汽车发展在这里。该团队使用雷达和三相机传感器融合算法,这是配置如图1所示。

图1:团队传感器位置(©aUToronto)
他们模仿相机传感器——连同他们的位置,方向,和配置——在DSD应用为了综合传感器数据反馈到他们的传感器融合算法。DSD模拟摄像机的输出后,团队的图像处理和计算机视觉算法,并将噪声和离群值添加到数据。
阅读器块是用来阅读的场景使用DSD创建场景信息。演员的姿势被作为输入的多个检测发电机。检测这些不同的传感器被打包为变量大小的ROS(机器人操作系统)消息数组和发送定制ROS特定ROS主题的消息(图2)。

图2:开环仿真软件模金宝app型测试(©aUToronto)
相比,团队从他们的输出对象跟踪地面真值的车辆。均方根误差(RMSE)指标用于性能评估。
闭环控制测试
团队的主要焦点是在测试他们对于新功能的修改计划重新路由施工区域和推动周围的障碍。规划师是重新设计使用一个晶格结构,边缘修剪从地图上找到路径对象作为必要的(图3)。DSD再次用于创建场景。障碍和交通信号灯也添加到场景中。

图3:晶格结构路径找到(©aUToronto)
团队模拟交通灯出版商使用Stateflow(图4)。当自我车辆范围(> 50米)的红绿灯,未知的状态发表。当自我变得范围内时,红灯消息发布。自我后的消息交换到绿灯已经停止5秒。

图4:Stateflow模型控制器(©aUToronto)
控制器、规划师和车辆模型ROS节点发射。如果自我的障碍是在50米车,它的位置作为ROS消息发送到仿真软件模型(图5)。金宝app

图5:逻辑发送位置信息(©aUToronto)
代码生成的控制算法
团队为停止信号处理算法生成的代码(图6)。仿真软件编码器用于Stateflow转换为c++代码。金宝app一个独立的模块使用包装的代码生成功能。生成的模块然后合并成团队的代码库。

图6:红灯控制逻辑Stateflow (©aUToronto)
创新使用MathWorks工具——激光相机校准
准确地解释的对象在一个场景从激光雷达和摄像头传感器输入,需要融合传感器一起输出。因此,团队之间执行转换激光雷达和团队相机项目激光雷达点到一个图像或副传感器融合。而不是用手测量和旋转摄像机,直到预测看起来很不错,该团队使用激光雷达的新开发的激光相机校准工具处理工具箱。这个工具估计刚性变换矩阵之间的对应关系,建立了三维激光雷达平面上的点和像素在图像平面。可以找到更多的信息关于这个工具在这里。
他们建造了一个大的标定板由于他们当前的一个太小的工具。的摄像机标定工具是用来获得内在矩阵的摄像机。棋盘的角落被发现在每一个图像,和激光雷达数据。激光雷达和摄像机之间的刚性变换矩阵。这个过程输出转换,可以用于点云数据投射到图像,反之亦然。这些步骤如图7所示。

图7:(a)相机内在矩阵(b)棋盘角(c)激光相机变换矩阵(©aUToronto)
凯特林大学
的学生团队凯特林大学赢得了2nd在挑战。
开环感知测试
该团队使用虚幻引擎来创建各种场景。相机被添加到ego-vehicle使用仿真3 d相机在虚幻的块。仿真金宝app软件模型用于执行车道检测使用不真实的图像(图8)。蓝色方块表示车道检测功能和黄色表示输出每一步。这些输出数据如图9所示。

图8:为开环仿真软件金宝app模型测试(©凯特林大学)

图9:车道检测输出(©凯特林大学)
闭环控制测试
团队的系统设计包括2状态机——纵向和横向。图中所示,这些状态机用于模型的逻辑控制器基于传感器的选择和决策数据。他们是相互关联的,用于启用和初始化控制器子系统。
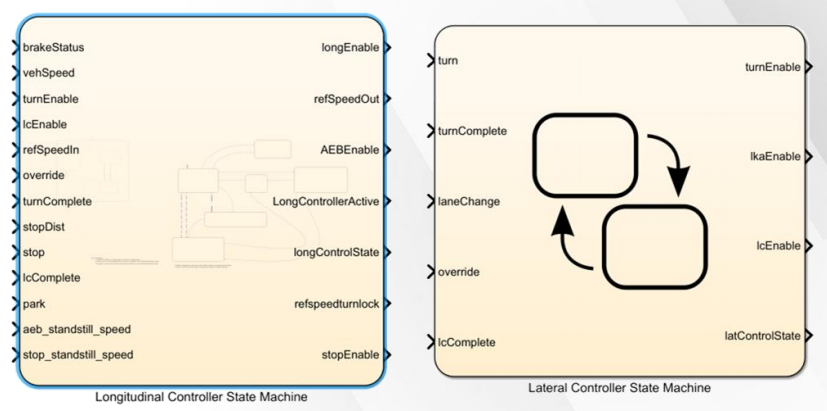
图10:状态机(©凯特林大学)
控制器模拟相结合,与仿真软件模型在图11中,进行验证工作的所有团队控制器。金宝app输入这些控制器提供使用滑块和仪表。

图11:仿真软件模型闭金宝app环测试(©凯特林大学)
纵向状态机的控制器子系统包括纵向速度控制器和自动紧急制动(AEB)。是由车辆纵向动力学加速,克鲁斯,减速,停滞不前,公园。
状态机的控制器子系统包括外侧车道保持辅助(党的)车道变化,并将控制器。基于车辆横向动力学状态测定(图12)。纵向速度、车道变化,党的控制器在下面讨论。

图12:横向控制器状态(©凯特林大学)
纵向控制器
图13显示了仿真软件模型用来模拟纵向控制金宝app器。它包括一个基于PID的速度。参考和输出转矩率仅限于保持竞争的加速和混蛋范围内。系统输入初始化和编辑与滑块和一个范围是用来查看数据。图14显示了目标和实际纵向速度输出。

图13:纵向控制器仿真软件模型(©凯特林大学)金宝app

图14:纵向速度比较(©凯特林大学)
车道改变控制器
团队的车道改变控制器使用自适应MPC(模型预测控制)。参考路径生成使用参数函数,车道改变输入车辆速度和车道宽度等。控制器的输出是参考侧卧位和偏航。一个3自由度(自由度)模型被用来模拟汽车的身体。图15显示了用于模拟仿真软件模型。金宝app图16显示了输出的模拟参考和模拟车道改变路径,以及车载测试后获得的路径。

图15:车道改变控制器仿真软件模型(©凯特林大学)金宝app

图16:车道改变路径的比较(©凯特林大学)
汽车模型
团队开发和验证一个3自由度单和双轨道车辆模型。初步验证了使用线性自行车模型。最后验证了与物理测试数据。图显示了侧向加速度比较输出初始和最终验证,没有和测试数据。

图17:(a) (b)横向加速度比较比较测试数据(©凯特林大学)
创新使用MathWorks工具——虚幻的城市
该团队使用虚幻的闭环测试所有的控制器。他们创造了一个虚幻的城市与可控行人运动和交通信号灯。创建可定制的演员和他们的信息,如演员的名字,演员,演员的细节,动画细节,和标签,为快速访问存储。创建一个红绿灯地图也随着灯光位置标记图18。
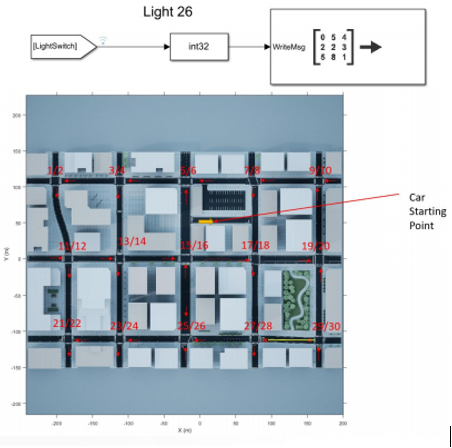
图18:虚幻红绿灯地图(©凯特林大学)
图19显示了Simulink-Unrea金宝appl系统通信结构。决策的不真实的场景,包括车辆位置,步行运动,交通信号灯状态等是使用Stateflow和发送作为控制器的输入(图20)。

图19:仿真软件不真实金宝app系统通信结构(©凯特林大学)
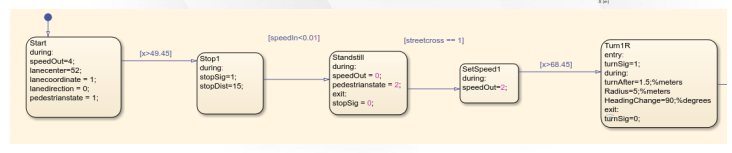
图20:Stateflow虚幻场景决策(©凯特林大学)
总之,多伦多大学和凯特林大学的学生团队能够利用MATLAB和Simulink仿真设计、构建、测试和评估融合、跟踪和导航算法来构建一个更近一步SAE四级自主车辆在模拟。金宝app他们编写复杂的场景和交通信号灯和多个演员在不同的模拟环境中,用仿真软件集成环境,部署和测试这些场景的选择算法。金宝app开环和闭环感知算法模拟和测试使用仿真软件,为这些系统和代码生成。金宝app团队设计和测试各种控制器算法使用仿真软件和Stateflow。金宝appMathWorks工具创新和广泛使用这两个冠军球队。
MathWorks提供了大量的免费软件和支持学生竞赛。金宝app的学生比赛MathWorks页面视频教程在各种主题,如物理建模,计算机视觉,代码生成,开始使用自动驾驶工具箱(ADT)等,让您和您的团队开始在你的竞争对手的挑战。的赛车休息室博客的博客所有MathWorks支持比赛,他们的学生团队,和他们的项目以及技术文章主题感兴金宝app趣的学生团队。
玩得开心设计自主汽车和编码快乐!
- 범주:
- 自动驾驶,
- 金宝app仿真软件,
- 团队的成就






댓글
댓글을남기려면링크를클릭하여MathWorks계정에로그인하거나계정을새로만드십시오。