号航空母舰
不确定状态空间模型
描述
使用号航空母舰模型对象表示不确定的动态系统。
模型不确定性的两种主要形式是:
基础微分方程模型参数的不确定性(不确定状态空间矩阵)
频域不确定性,通常通过描述频率响应中的绝对或相对不确定性(不确定或未建模的线性动力学)来量化模型不确定性。
号航空母舰模型对象可以用其中一种或两种形式的不确定性来表示动态系统。您可以使用号航空母舰进行鲁棒稳定性和性能分析,并测试控制器设计的鲁棒性。
创建
有几种方法可以创建号航空母舰模型对象,包括:
使用
特遣部队具有一个或多个不确定实参数(尿素的).例如:p=尿素(“p”1);Usys = tf(p,[1 p]);有关另一个示例,请参见具有不确定系数的传递函数.
使用
党卫军具有不确定状态空间矩阵(umat).例如:p=尿素(“p”,1);A=[03*p;-pp^2];B=[0;p];C=1(2);D=0(2,1);usys=ss(A,B,C,D);有关另一个示例,请参见状态空间模型不确定.
使用模型连接命令将数值LTI模型与不确定元素组合起来,例如
连接,系列或平行,或模型算术运算符,如*、+、或-。例如:Sys = tf(1,[1 1]);p=尿素(“p”1);D = ultidyn (“δ”[1]);usys = p*sys*(1 + 0.1*D);
有关另一个示例,请参见不确定动力学系统.
将双数组或数字LTI模型转换为
号航空母舰表格使用忙=号(系统).在这个例子中,结果是号航空母舰模型对象没有不确定元素。例如:M=tf(1[1]);usys=uss(M);
使用
ucover创建一个号航空母舰其可能频率响应范围包括一系列数值LTI模型中的所有响应的模型。结果模型将行为范围表示为动态不确定性(ultidyn).
属性
对象的功能
大多数在数字LTI模型上工作的函数也可以号航空母舰模型。这些包括模型互连功能,例如连接和反馈,线性分析函数,如预兆和stepinfo.生成图的一些函数,例如预兆和一步,绘制不确定模型的随机样本,让你对不确定动力学的分布有一个感觉。然而,当您使用这些命令返回数据时,它们仅对系统的标称值进行操作。
此外,还可以使用诸如robstab和wcgain对以。表示的不确定系统进行鲁棒性和最坏情况分析号航空母舰模型。您还可以使用诸如systune用于鲁棒控制器整定。
下面的列表包含了可以使用的函数的一个代表性子集号航空母舰模型。
例子
具有不确定系数的传递函数
建立具有不确定固有频率和阻尼系数的二阶传递函数。
w0=尿素(“w0”10);ζ=尿素的(“泽塔”,0.7,“范围”[0.6, 0.8]);Usys = tf(w0^2,[1 2*zeta*w0 w0^2])
usys=具有1个输出、1个输入、2个状态的不确定连续时间状态空间模型。模型不确定性由以下模块组成:w0:不确定实数,标称值=10,可变性=[-1,1],5次出现zeta:不确定实数,标称值=0.7,范围=[0.6,0.8],1次出现类型“usys.NominalValue”以查看标称值,“get(usys)”以查看所有属性,以及“usys.un确定性”以与不确定元素交互。
usys是一个不确定的状态空间(号航空母舰)模型与两个控制设计块。不确定实参数w0在传递函数中出现五次,在分子中出现两次,在分母中出现三次。若要减少出现次数,可以通过将分子和分母除以w0 ^ 2.
usys=tf(1[1/w0^2*zeta/w0 1])
usys = 1输出,1输入,2状态的不确定连续时间状态空间模型。zeta:不确定的真实,名义= 0.7,范围=[0.6,0.8],1个事件类型“usys”。NominalValue“查看名义值”,get(usys)“查看所有属性”,以及“usys. value”。“不确定性”与不确定因素相互作用。
在新的公式中,不确定参数只出现了三次w0.减少控制设计块在模型中的出现次数可以提高涉及模型的计算性能。
检查系统的阶跃响应,以了解不确定性代表的响应范围。
步骤(忙)
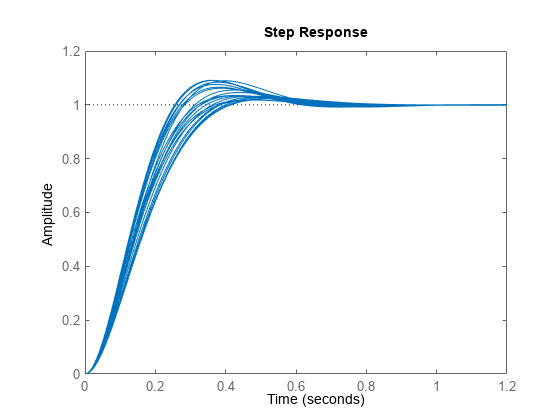
使用线性分析命令时,如一步和预兆为了创建不确定系统的响应图,他们自动绘制系统的随机样本。虽然这些样本可以让你了解在不确定性范围内的响应范围,但它们不一定包括最坏情况的响应。为了分析不确定系统的最坏情况响应,使用wcgain或wcsigmaplot.
状态空间模型不确定
要创建不确定状态空间模型,首先使用Control Design Blocks创建不确定元素。然后,使用元素来指定系统的状态空间矩阵。
例如,创建三个不确定的实参数,并以此构建状态空间矩阵。
p1 =尿素的(“p1”,10,“百分比”, 50);p2 =尿素的(“p2”3,“普鲁斯米努斯”,(-。5 1.2]);p3 =尿素的(“p3”, 0);A = [-p1 p2;0 p1);B = [p2;p2和p3);C = [1 0;1 1-p3];D = [0;0);
用不确定参数构造的矩阵,一个,B,及C,为不确定矩阵(umat)对象。使用它们作为输入党卫军结果是一个2输出,1输入,2状态的不确定系统。
sys = ss (A, B, C, D)
sys =不确定连续时间状态空间模型,具有2个输出,1个输入,2个状态。模型的不确定性由以下几个模块组成:p1:不确定实数,名义值= 10,可变性=[-50,50]%,2次出现p2:不确定实数,名义值= 3,可变性=[-0.5,1.2],2次出现p3:不确定实数,名义值= 0,可变性=[-1,1],2次出现NominalValue"查看标称值,"get(sys)"查看所有属性,"sys. value "查看所有属性。“不确定性”与不确定因素相互作用。
显示屏显示系统包含三个不确定参数。
不确定动力学系统
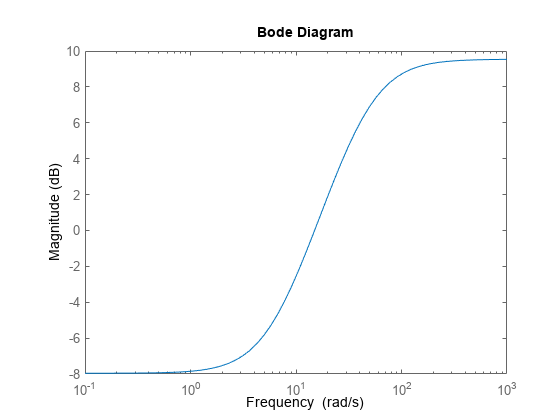
创建一个不确定系统,该系统包含一个具有频率依赖的不确定性量的标称模型。你可以使用ultidyn以及表示不确定性频率分布的加权函数。假设在低于3 rad/s的低频率下,模型与其标称值的差异可达40%。在3 rad/s左右,百分比变化开始增加。不确定度在15 rad/s时超过100%,在约1000 rad/s时达到2000%。创建具有适当频率剖面的传递函数,Wunc,用作加权函数,用频率调节不确定性量。
Wunc =补足重量的东西(3)0.40,15日;bodemag (Wunc)
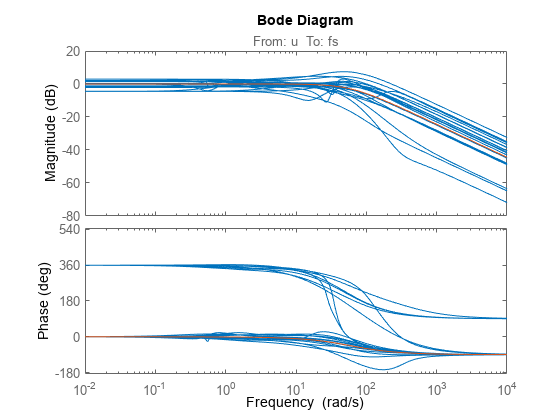
接下来,创建表示系统标称值的传递函数。在本例中,使用一个传递函数,其中一个极点位于年代= -60 rad / s。然后,创建一个ultidyn表示单输入、单输出不确定动态的模型,并将加权不确定性添加到标称传递函数中。
sysNom = tf(1,[1/60 1]);unc = ultidyn (“unc”[1],“SampleStateDim”3);不确定动力学的样本有三种状态usys=sysNom*(1+Wunc*unc);%设置usys属性忙。InputName =“u”;usys.OutputName=“fs”;
检查usys的随机样本,看看不确定动力学的影响。
波德(忙usys.Nominal)
uss Objects的属性
号航空母舰与所有模型对象一样,模型包括存储动态和模型元数据的属性。查看不确定状态空间模型的属性。
p1 =尿素的(“p1”,10,“百分比”, 50);p2 =尿素的(“p2”3,“普鲁斯米努斯”,(-。5 1.2]);p3 =尿素的(“p3”, 0);A = [-p1 p2;0 p1);B = [p2;p2和p3);C = [1 0;1 1-p3];D = [0;0);sys = ss (A, B, C, D);创建uss模型(系统)
NominalValue: [2x1 ss] Uncertainty: [1x1 struct] A: [2x2 umat] B: [2x1 umat] C: [2x1 umat] D: [2x1 double] E: [] StateName: {2x1 cell} StateUnit: {2x1 cell} InternalDelay: [0x1 double] InputDelay: 0 OutputDelay: [2x1 double] Ts: 0 TimeUnit: 'seconds' InputName: {"} InputUnit: {"} InputGroup: [1x1 struct] OutputName: {2x1 cell} OutputUnit:注意:[0x1 string] UserData: [] Name: " SamplingGrid: [1x1 struct] "
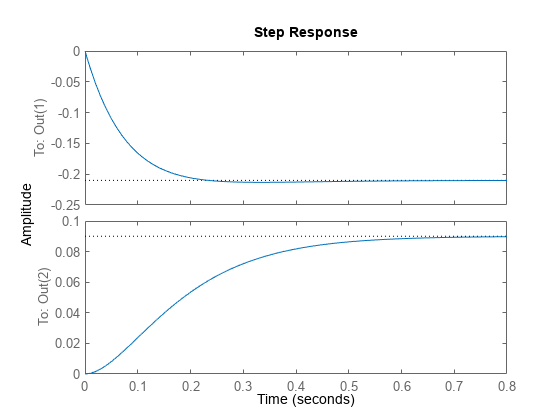
大多数属性的行为类似于它们的行为党卫军模型对象。的NominalValue属性本身就是党卫军模型对象。因此,您可以像分析任何状态空间模型一样分析标称值。例如,计算标称系统的极点和阶跃响应。
极(sys.NominalValue)
ans =2×1-10 -10
步骤(系统标称值)
如不确定矩阵(umat),不确定性属性是包含不确定元素的结构。可以使用此属性直接访问不确定元素。例如,检查范围命名的不确定元素p2在sys.
系统不确定度p2范围
ans =1×22.5000 - 4.2000
改变的不确定度范围p2在sys.
sys.inclusion.p2.Range=[2 4];
此命令只更改被调用参数的范围p2在sys.它不改变变量p2在MATLAB工作空间中。
p2。范围
ans =1×22.5000 - 4.2000
你也可以从以下列表中选择一个网站: