主要内容
摄像机校准
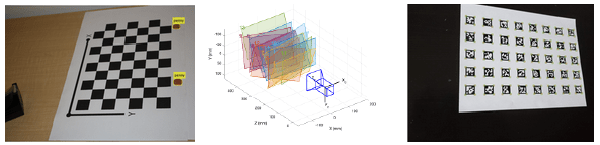
校准单摄像机或立体摄像机,并使用针孔和鱼眼摄像机模型估计摄像机内部、外部和失真参数
功能
话题
估计图像或摄像机的镜头和图像传感器的参数。
鱼眼相机的数学模型及其在MATLAB中的标定。
估计相机内部、外部和镜头畸变参数。
校准立体相机,你可以用它来从图像中恢复深度。
指定像素索引、空间坐标和三维坐标系统
为几种类型的特性选择返回和接受点对象的函数
特色实例




你也可以从以下列表中选择一个网站:
