分段
段将3-D范围数据组织成簇
句法
Description
标签= segmentlidardata(ptcloud,,,,distThreshold)ptcloudinto clusters. The function assigns an integer cluster label to each point in the point cloud and returns the cluster label of all points in标签。
这function groups two neighboring points into the same cluster if their Euclidean distance is less thandistThresholdor if the angle between the sensor and two neighboring points is at least 5 degrees.
标签= segmentlidardata(ptcloud,,,,distThreshold,,,,Anglethreshold)Anglethreshold。
[[also returns the number of clusters.标签,,,,numClusters] = segmentLidarData(___)
[[___] = segmentLidarData(___,numClusterPoints = [1,Inf])还设置了每个群集中的最小值和最大点,指定为2元素向量或标量值。指定时numClusterPoints作为标量,群集中的最大点是不受限制的。该功能设置标签至0当群集不在指定范围内。
Examples
Cluster Organized Synthetic Lidar Data
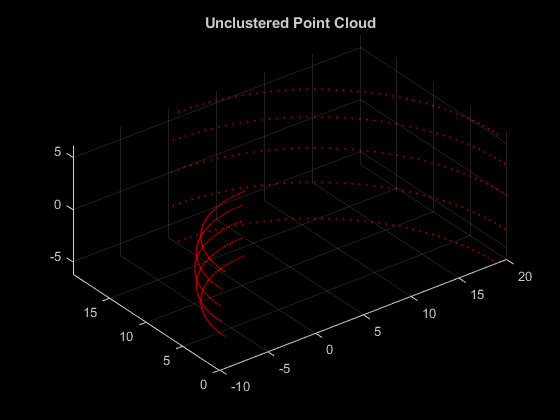
创建有组织的合成激光雷达数据,其中包含两个对象。
ldr =零(5,100);ldr(:,1:50)= 10;ldr(:,51:end)= 20;螺距= linspace(-18,18,5);pitch = repmat(俯仰',1,100);yaw = linspace(-90,90,100);yaw = repmat(Yaw,5,1);
Convert to Cartesian coordinates.
X = ldr .* cosd(pitch) .* sind(yaw); Y = ldr .* cosd(pitch) .* cosd(yaw); Z = ldr .* sind(pitch); pc = pointCloud(cat(3,X,Y,Z)); figure pcshow(pc.Location,'r')title('Unclustered Point Cloud')
设置阈值。
距离= 5;
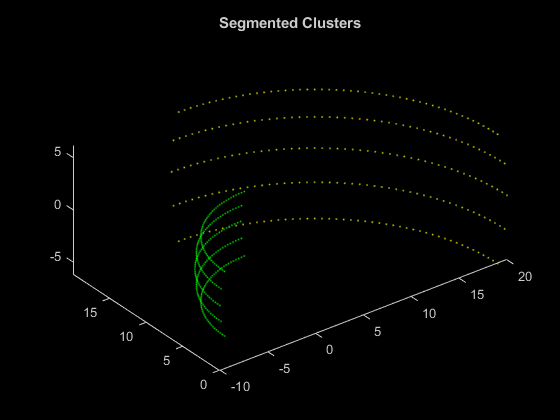
细分LiDAR数据。
标签= SemgentlidardAtata(PC,Distthreshold);
绘制结果。
figure holdontitle('Segmented Clusters')pc1 = select(pc,find(labels == 1));pcshow(pc1.location,'g')pc2 = select(pc,find(labels == 2)); pcshow(pc2.Location,'y')
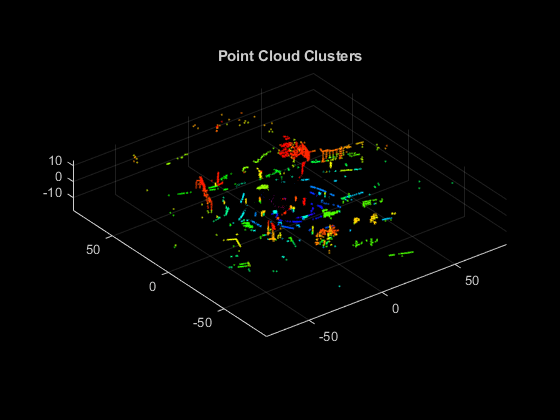
簇有组织的雷达点云
设置PCAP文件读取器。
veloreader = velodynefilereader('lidarData_ConstructionRoad.pcap',,,,'HDL32E');
从文件开头等待0.3秒,然后从下一帧中读取点云。
veloReader.CurrentTime = veloReader.StartTime + seconds(0.3); ptCloud = readFrame(veloReader);
Segment and remove the ground plane.
gruendptSidx = segmentgroundFromlidArdata(ptCloud);ptcloudwithoutground = select(ptcloud,〜cloverptsidx,“输出尺寸”,,,,'full');
聚集剩余点。距离为米。
distThreshold = 0.5; [labels,numClusters] = segmentLidarData(ptCloudWithoutGround,distThreshold);
为接地平面添加一个额外的标签。
numClusters =数字+1;标签(subporptSidx)=数字;
绘制标记的结果。用黑色显示接地平面。
labelColorIndex = labels+1; pcshow(ptCloud.Location,labelColorIndex) colormap([hsv(numClusters);[0 0 0]]) title(“点云簇”)
Input Arguments
ptcloud-Point cloud
pointCloud目的
Point cloud, specified as apointCloud目的。ptcloudis an organized point cloud that stores point coordinates in anm-by-n-by-3 matrix. The points must be organized by pitch and yaw angles in a sequential scanning order, which is typically obtained from laser range finders and thevelodynefilereader。
distThreshold-距离阈值
nonnegative scalar
世界单位中的距离阈值,指定为非负标量。如果它们之间的距离小于距离阈值,则将相邻点分组为相同的群集。为了减少输出簇的数量,请增加distThreshold。
数据类型:单身的|double
Anglethreshold-Angle threshold
scalar in the range [0, 180]
角度阈值以度为单位,在[0,180]范围内指定为标量。为了减少输出簇的数量,请降低Anglethreshold。如果传感器形成的角度和点大于角阈值,则函数组相邻到同一群集中。例如,在图中,如果传感器,点A和点B形成的角度大于Anglethreshold。For more details, seeAlgorithms。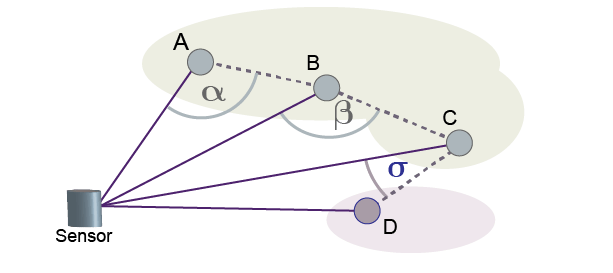
数据类型:单身的|double
输出参数
Algorithms
这分段function uses distance and angle thresholds to cluster neighboring points. The function groups two neighboring points into the same cluster if their Euclidean distance is less than the inputdistThresholdor if the angle between the sensor and neighboring points is greater than or equal to the inputAnglethreshold。If you do not specifyAnglethreshold,,,,the function sets this angle to5学位。
例如,假设Anglethresholdis set to90。由于图中的角度α和β都大于指定的90度阈值,因此函数组将A,B和C指向同一群集。由于角度σ小于90度阈值,因此函数组将D指向单独的群集。函数用于群集的每个角度都是由从一个点到传感器的线形成的,从同一点到相邻点的线
References
[[1] Bogoslavskyi, I. “Efficient Online Segmentation for Sparse 3D Laser Scans.”摄影测量,遥感和地球信息科学杂志。Vol. 85, Issue 1, 2017, pp. 41–52.
扩展功能
版本历史记录
You can also select a web site from the following list:
Americas
- América Latina(Español)
- Canada(English)
- United States(English)