
您还可以从以下列表中选择网站:
Arkadiy Turevskiy, MathWorks
PID控制是普遍存在的。虽然PID控制器的设计和整定在理论上很简单,但在实践中却很困难和耗时。网络研讨会将从PID控制的快速理论入门开始。MathWorks的工程师将介绍一种简单而直接的方法来快速设计、调整和实现PID控制器。
通过演示,您将学习如何:
关于演示者:Arkadiy Turevskiy在MathWorks的技术营销组工作,支持Simulink和控制设计产品。下载188bet金宝搏金宝app金宝app在加入MathWorks之前,他在Pratt & Whitney工作,在那里他开发了大型飞机引擎的控制系统。
录制时间:2017年3月14日
大家好,欢迎来到我们的网络研讨会,简单的PID控制。我叫阿卡迪·图雷夫斯基。我在MathWorks的控制团队工作。对于那些不记得或不知道PID控制是什么的人,我们将从PID控制的快速入门开始这个网络研讨会。然后,我们将通过一个在Simulink中设计和实现PID控制器的工作流。金宝app
在我们开始阅读初级读物之前,让我们快速看一下我们今天将要创建的最终产品。为此,让我切换到MATLAB。我们将打开一个Simulink模型。金宝app
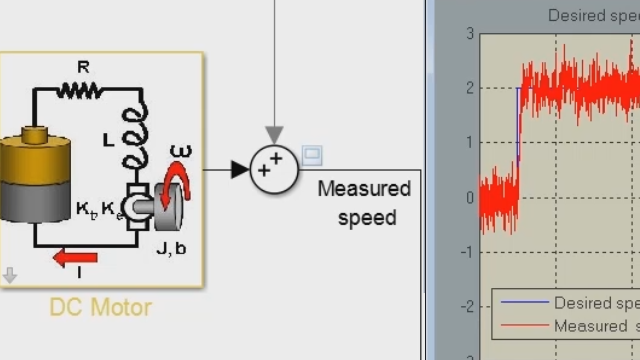
这是一个闭环发动机控制系统的模型。这可能是汽车发动机或工业机器中的发动机。发动机在子系统中建模,输入油门,输出转速。在MyController子系统中还有PID控制器。
如果我们运行模拟,您将看到此PID控制器适用于定点数据类型。您还可以看到它是一个离散时间PID控制器。您还可以在右侧看到模拟的结果。
你在右上方的图中看到的黄线是速度参考信号。你可以看到,你正在命令速度从2,000 RPO改变到2,200 RPM。洋红色的这条线是实际测量的速度。如你所见,控制系统或PID控制器在提供快速和稳定的参考跟踪方面做得很好。
在Simulink中设计并验证PID控制器后,自动生成C代码。金宝app稍后我将更详细地向您展示如何做到这一点。但是现在,让我简单地打开生成的代码并显示文件。
正如您在这里看到的,大约有30行代码,其中实际的PID算法是在大约10行高效、紧凑的定点代码中实现的。当然,实际的控制系统将包含比简单的PID控制器更多的功能。但在本次网络研讨会中,我将只关注PID控制器的设计和生成代码。
现在,当我们看到最终产品时,让我们退一步,谈谈PID控制的入门知识。那么什么是PID控制?PID代表比例积分微分。如果你看维基百科上的PID控制器的图片,你会看到我们试图控制的过程,比如我们的引擎模型。
您将看到从设定点减去的测量输出,以计算误差信号。然后,PID控制器,如图所示,通过使用三个不同的项创建执行器请求,如图中三个不同的框所示:比例项,即误差信号乘以增益KP;积分项,即误差信号积分的积分增益KI;导数项,即导数增益KD乘以误差信号的导数。
那么为什么我们需要这三个不同的术语呢?让我们切换回MATLAB。让我们使用我在这里准备的一个简单脚本来了解这一点。
在这个脚本中,我们将使用来自Control System Toolbox(比如TF)的命令来说明为什么我们需要三个不同的术语。我们将从创建植物模型的传递函数开始。我们叫它sys。正如你所看到的,它是一个简单的二阶传递函数时滞是0.2秒。
我们来看看这个传递函数的阶跃响应。就像这样。我们可以检查开环系统的上升时间。我们看到大约是7.7秒。
我们从设计控制器开始。首先,我们要做的是只用一个比例项。我们从增益值3开始。使用来自控制系统工具箱的命令,我们将计算闭环系统并绘制其阶跃响应。
阶跃响应现在显示在黄线中。我们看到它比开环动力学快得多。但稳态误差不是0。也就是说,闭环阶跃响应没有达到参考值1。
因此,我们可以尝试通过增加比例增益值来解决这个问题。让我们尝试一下。使用这个小部件,我们可以增加增益并在脚本单元中重新运行计算。如果我们多次这样做,我们将看到稳态区域越来越小,但以牺牲闭环系统的稳定性为代价我们开始看到隔离和超调增加,所以增加比例增益不是一个好的解决方案。
现在我们加上积分项,积分增益为0.8,然后重新计算。现在,我们将比例增益为0.3的纯比例控制器(黄线)的响应与比例积分或所谓的PI控制器(比例增益为3,积分增益为0.8)的响应进行比较。正如你所看到的,积分项的加入消除了稳态误差,同时仍然保持了系统的稳定性,这样我们的超调量很小,并且我们没有太多的隔离。
我们可以使用导数项,我们将在这里添加,使用PID命令的sort参数来增加系统的稳定性。那我们就这么做吧。PID控制器响应显示在绿线中。正如你所看到的,它的响应时间,上升时间和PI控制器差不多,所以它也很快。但同时,我们最小化了超调,消除了这个下冲,所以我们的系统更加稳定。
所以我们首先需要比例项。然后积分项消除了稳态误差。导数项允许我们增加系统的稳定性。
那么,如果PID控制器仅仅是三个增益——比例增益、积分增益和导数增益——这里的问题是什么?您可以快速地编写一些C代码,将其与我们的机器原型连接起来,并开始调整这些收益。
当你这样做的时候会遇到很多挑战。有时,你的工厂模型是不稳定的。所以如果你开始在原型上调整它,你的整个闭环系统就会变得不稳定。这会损害你的植物。
可能会有一种叫做积分器结束的危险情况。你需要逻辑来保护自己。我稍后会更详细地解释。
很多时候,当人们调整PID控制器时,他们会使用一些植物模型来作为PID控制器增益。但很多时候,这种植物模型是不可用的。在那种情况下我们该怎么做?
如果需要在微处理器上实现PID控制器,特别是如果该微处理器具有定点架构,则需要考虑采样和参数的离散化。这也是一个挑战。
我们看到的例子是一个简单的单输入单输出系统。但是很多系统都有多个输入和多个输出。我们也需要有能力处理这些问题。最后,即使你处理的是单输入单输出系统,植物的动态可以从一种操作条件到另一种会发生很大的变化。这些只是人们在设计和实现PID控制器时必须面对的一些挑战。
现在,我想回到我们开始的例子,发动机控制系统,并介绍为该系统设计PID控制器的工作流程,在此过程中,强调我们如何帮助您解决其中的一些挑战。现在让我们切换到MATLAB。让我们打开我们将要使用的示例。
这是一个模型,我们要为引擎系统创建一个PID控制器。我们还没有PID控制器,但我们有引擎子系统。让我们在里面导航。
这里我们有多个组成部分。如果你深入研究其中一个,你会发现我们在这里实现的方程是非线性的。这里是另一个非线性方程。这里还有一个。因此,在这种情况下,植物动力学是非常非线性的。
在这个顶级模型中,我们有引擎子系统。我们有速度参考块。我们有一个求和模块,用于计算参考速度和测量速度之间的误差信号。
现在我们继续添加一个PID控制器块。我们将使用离散PID控制器。让我们将此块连接到系统的其余部分。
我们不要打开这个块的块对话框。这里有很多选择。我不会全部解释。这里有一个非常好的帮助文件,您可以阅读该文件以获取有关此PID控制器块中所有不同选项的详细信息。
但我将在这里强调一些想法。您可以选择要实现的控制器类型:PI、PD、仅比例、仅积分或PID。您可以选择形式。我们在这里提供两种不同的形式供您选择。当您在块对话框中更改形式或进行任何其他更改时,您将看到控制器的形式得到更新。
当然,您可以指定采样时间。设为0.01秒。单击Apply。
我们可以更改控制器的增益。稍后我们将讨论这个问题。在“高级”选项卡中,我们可以指定输出饱和。如果需要,我们可以启用防饱和保护。同样,我们将在稍后讨论所有这些。
当我们进行这些更改时,如果我们想看看在这里的罩下实现了什么,我们总是可以在这个块上单击鼠标右键,进入蒙版菜单,然后在蒙版下查看。我们将看到使用基本的Simulink块(如增益、滤波器、积分器和求和块)为这个块实现的逻辑。金宝app所以它从来都不是一个黑盒子。你总能看到这里实现了什么。
我们回到这里。让我们保持简单的设置,PID控制器。我们跳过平行形式。让我们关闭输出命令的限制。好吧。
这里不使用默认增益1,1,0和100,我们将这个系统参数化。这个参数是kp ki kd。这些参数被设置成我们在MATLAB中看到的值。我马上就给你们看。点击Apply。
我们也来改变PID控制器中积分器的初始值这样PID控制器块的初始输出就等于9。通过玩引擎子系统,我知道你需要一个大约9的油门请求来获得大约2000转/分钟的输出速度。点击应用。
为了让您相信,您是从默认增益值开始的,让我们转到MATLAB。在这里,您可以看到这些参数的值设置为默认值。
让我们切换回Simulink模型。金宝app现在让我们运行模拟。如果我们看看结果,我们会发现响应是不稳定的。这并不奇怪,因为我们还没有改变收益值。
现在我们来讨论一下如何调整增益值。我们可以通过进入方块对话框并按下Tune按钮来做到这一点。这启动了一个叫做PID Tuner的工具,它需要Simulink控制设计。金宝app这个工具在时间0时线性化非线性Simulink模型,并打开你在这金宝app里看到的PID调谐器应用程序。
利用该工具从线性Simulink模型中得到的传递函数,自动提出PID控制器增益,为跟踪提供良好的参考。金宝app你可以在这里查看PID参数、增益值和其他特性。如果我们喜欢这个设计,我们可以简单地更新块参数。
块对话框中没有任何更改。但是如果你用MATLAB,我们看到增益值已经更新了。
让我们回到我们的Simulink模型。金宝app现在让我们重新运行模拟。让我们看看结果。
现在我们看到我们摆脱了这种不稳定。我们有良好和稳定的反应。但也许我们想消除油门指令中的峰值,因为这可能不现实。
我们可以回到PID控制器,打开这个PID调谐器,也许会让系统的响应变慢一点。实际上,我们可以看另一个图我们可以看控制器的努力,我们控制了多少油门,看看它是如何变化的。在默认设计中,我们看到一个峰值。但如果我们继续放慢速度,就能减少峰值。
让我们在这里试试这个设计。再次更新块参数。重新运行模拟。现在我们有了漂亮、稳定的设计,油门指令没有尖峰。
很快地,你们看到了我们如何使用PID Tuner应用来调整PID控制器增益,以及我们如何微调设计。如果你想使用更严格的调优工具,如波德图或根轨迹,我们有另一个应用程序,叫做控制系统设计师,你可以使用。但我现在不打算展示。
接下来我想重点介绍的是一种情况,即你不知道工厂模型。你不知道描述工厂动态的方程式。但是你可能有机会接触到原型或实际过程或你试图控制的工厂。
让我们假设我们不知道引擎的方程式,但我们可以访问实际的引擎。我们可以命令引擎的输入,比如这里的油门请求,并测量输出。在这种情况下,我们正在进行开环测试,我们只需命令油门在2秒钟内以一种逐步的方式从大约8.9改变到大约9.4。但我们也可以运行相同的初步控制器,可能我们想要改进,因此我们可以命令该控制器的速度参考变化,并测量产生的油门和发动机产生的速度。
所以我想说的是,我们可以使用的数据不一定是开环数据,但它可以是闭环引擎操作的结果。但是一旦你测量了设备的输入和输出,这里的想法是我们可以用这些数据从数据中识别出一个设备模型,然后用这个识别出的设备模型来调整我们的PID控制器。
我们来做一下。让我们打开PID Tuner应用程序。这个应用程序与我们刚刚在Simulink模型中用于调整PID控制器增益的应用程序基本相同。金宝app但现在我们没有一个植物模型来开始,所以我们需要确定一个新的植物模型。
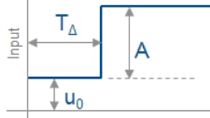
这为识别植物模型打开了另一个窗口。我们需要从将IO数据引入工具开始。这里你可以选择。您可以携带任意的IO数据。但在我们的例子中,我们使用步进响应选项,因为我们拥有的数据实际上是步进响应。
输出信号存储在可变输出中。我们知道的输入信号的振幅是0.5。它大约从8.9开始,或者实际上我们有输入信号,所以我们可以从那里得到初始值。我们知道这一步大约发生在2秒钟。我们的时间向量从0开始,组装时间为1/100秒。
让我们把数据带进来。现在我们看到绿色的曲线,这是测量的引擎速度,蓝色的曲线,这是一个模型的输出,我们试图把它输入到绿色的线。让我们看看输入数据,这是我们命令引擎的一个步骤,节气门步骤。
好吧。为了得到更好的拟合,我们去掉测量数据中的偏移。所以发动机的启动速度不是2000,而是0。我们会到Preprocess,移除偏移量。让我们去掉所有信号的偏移量。然后去掉初始信号值。
我们会更新它。这是我们的新数据。我们将关闭这个对话框。
这是在绿线中删除了偏移量的数据。我们现在正试着用一阶模型来拟合这个数据,你可以看到这里的公式。我们可以交互调整控制中的两个参数,稳态增益和该模型的时间常数。
我们可以尝试不同的结构;例如;一对欠阻尼极点。让我们选择一个不同的模型。我们可以交互地对其进行调整,或者我们可以让工具自动提出最佳参数值,以提供最优的适合度。
如果我们这样做,这个工具就能很好地匹配这里,就像你看到的。在右下角,你可以看到设备的参数。现在让我们说我们对这个植物模型很满意,所以我们可以使用它并关闭这个对话框。
现在我们在调整我们的PID控制器针对我们刚确定的这个模型。让我们选择带微分滤波器的PID控制器作为我们想要使用的PID控制器类型。我们看到我们现在有很好的阶跃响应稳态误差为零。我们可以让它快一点。一旦我们喜欢这个设计,我们可以导出它并将它保存在MATLAB工作空间变量c中。
现在,如果我们回到MATLAB,我们有一个变量c。如果你看看它是什么,它是一个连续时间PID控制器,具有这些增益值。我们可以通过键入c.kp、c.ki等来访问这些增益值。所以现在我们可以将这些增益放入Simulink中的PID控制器块中,以便进一步实现。金宝app
总之,在本节中,我们研究了两种不同的PID控制器调整方法,一种是在Simulink中使用描述电厂动态的方程的电厂模型,另一种是不知道方程但可以访问测量的输入/输出数据。在这种情况下,您可以使用集成到PID Tuner应用程序中的系统识别工具箱,首先从数据中识别电厂模型金宝app,然后使用该识别的电厂模型调整PID控制器的参数和增益。
现在让我们来谈谈实现。这和我们刚刚使用的模型差不多。但在这里,我们添加了零阶整本书来表示A到D的转换。我们把PID控制器放在子系统里面。我们还添加了数据类型转换块。
现在我们要做的是将这个浮点设计转换为定点设计,在定点处理器上实现,然后生成代码。让我们从运行模拟开始。假设这是我们开始使用的设计。你看现在所有的信号都是双倍的。
现在为了将这个设计扩展到固定点,我们将推出固定点工具,它和我们的产品一起发布,叫做固定点设计师。好吧。我们已经得到了刚才模拟的结果。因此,您将清除所有结果,并首先运行。我们将从用双精度覆盖控制器子系统中的所有参数开始。这就是这个设置的作用。
我们会运行这个模拟。我们将在运行中保存模拟的结果,我们将其命名为Double。我们来做一下。让我们模拟我们的模型。
结果显示在这里。如你所见,对于PID控制器块中的所有参数,我们都使用双重数据类型。对于子系统内的所有信号,我们在模拟过程中获取最小值和最大值。
现在我们要做的是使用在模拟过程中捕捉到的最小值和最大值来自动进行定点缩放。为此,我们将向下滚动。在这里,我们将配置建议分数长度的选项。我们希望使用固定的16位字长。对于固定的字长,我们希望工具能够提出分数长度。因此,我们将坚持这一选择。
浮点信号的默认数据类型将与嵌入式硬件整数相同。我马上会解释这是什么意思。我们将使用模拟的最小/最大数据与一些安全边际,以脱离定点缩放。
现在让我们回到一个模型。在模型中,我所做的是在模型配置参数设置中,有一个节点叫做硬件实现。这里,我已经指定了我们想要在一个通用的16位嵌入式处理器上实现我们的控制器。我可以选一个特定的。但在这里,我想保留通用架构。
所以这里重要的是,通过这种方式,定点工具,当我们说默认数据类型与嵌入式硬件整数相同时,它知道我们的目标是16位处理器。因此,让工具为我们提出分数长度。因此,让我们点击这里。
所以工具继续前进,提出了你们在这里看到的建议。让我们继续为所有参数应用建议的分数长度。
现在让我们回到Simulink模型。金宝app打开PID控制器块并查看数据类型步骤。现在你看到这里所有的数据类型都是固定的16位点。
现在我们要做的是确保我们刚刚提出的定点缩放将使我们的结果接近我们的浮点设计。为此,我们将使用本地设置,即我们刚才看到的定点缩放,而不是像我们首先做的那样将所有数据类型重写为double。我们将把运行的结果保存到一个名为Fixed Point的运行中。
因此,让我们应用这些更改。让我们运行模拟。
我们看到我们现在有两次跑步,定点和双人。编译的DT列显示模拟期间使用的数据类型。您可以看到,我们在定点运行中使用了定点,在初始运行中使用了双数据类型。
现在让我们看看错误信号。让我告诉你它在模型中的位置。这里是这个信号。你看,我们正在记录它。它是参考设定点、参考速度和测量速度之间的差值。
对于信号,我们将比较运行。在上面这里,实际上有两个情节。他们看起来很接近。
但是如果你放大一点,你会看到有一点不同。这就是你实际看到的。上图中两条线之间的差异就是你在下图中看到的。所以让我缩小。
这里需要注意的有趣的事情是在浮点数和定点数之间稳态值是不同的。放大这里可以看到。记住,这是一个定点缩放的模拟结果。所以定点缩放的结果,稳态误差不再是零。这是有趣的。这告诉你也许你需要在缩放单元格上多做一些工作,或者忍受这个非零稳态误差,或者去处理一些流程服务。
但这是你作为工程师的选择。这里的重点是向您展示如何使用此定点工具快速进行定点缩放,如图所示。
现在,当我们这样做的时候,下一步是生成代码。有多个讨论如何配置代码生成的网络研讨会。我将快速地向你们展示如何从这个PID控制器块生成代码。同样,在现实生活中,你的控制器要比一个简单的PID控制器块复杂得多。但这个想法还是适用的。
比方说,构建一个子系统。我配置了这个模型来生成高效的代码,优化了ROM和RAM的效率。我会设置控制器增益参数,可调参数。我们会继续生成代码。
下面是生成的代码。你可以看到我们的收益。您可以在这里看到一些初始化代码。实现PID控制器的算法在这里。
那么如何处理生成的代码呢?当然,你可以把它放在处理器上,然后开始测试,等等。但我想快速强调一个选项,你们称之为软件在循环中测试。这里的想法是使用生成的代码,并在主机上用Simulink中的植物模型测试它,以确保生成的代码给您的结果与Simulink模型中的块完全相同。金宝app
为此,我们再次进入“代码生成”菜单。但是现在我们选择一个选项来生成一个S函数。同样,我们可以使这些参数可调。我们选择这个选项,在循环块中创建软件,然后单击Build。
同样,这个工具会为我们生成代码。但现在它也创建了一个block,你们马上就会看到。这个块被称为软件在环,SIL。我们把它从这个模型中复制到原始模型中。
让我们删除我们为其设计并进行定点缩放的PID控制器块,并将其替换为循环中的软件块。如果我运行模拟,我将得到完全相同的结果,我们将在一秒钟内看到。
但是如果我现在看block mask下面,它不是我们之前看到的PID控制器block。我们实际上在这里调用生成的代码。我们要确保生成的代码和我们设计的PID控制器块得到的结果完全一样。
这段代码正在主机上运行。所以下一步是在处理器上测试它。但这超出了我今天要讨论的范围。
可以现在我们讨论了控制器的设计、增益的调整和实现、定点缩放以及代码的生成。所以,让我们关闭这个模型,然后讨论当设备动力学从一种运行条件到另一种运行条件发生很大变化时的情况。在这种情况下,它实际上改变了很多,从2000 PM到6000 RPM。
让我打开脚本并向您展示。在这个脚本中,我们将要工作,让我在这里找到一个你在这里看到的开环引擎模型。所以我们将把这个模型从油门输入线性化到测量的速度输出。我们将使用的工具称为Simulink控件设计。这个工具有一个很好的图形应用程序,你可以使用它来线性化模型,或者你可以使用我在这里选择用于批处理模式线性化的编程工作流。金宝app
在脚本中,我们将线性化我们的工厂模型,速度点从1400到6000,步长为200。使用来自Simulink Control金宝app Design的命令,例如findop和linearize,我们将在所有这些不同的操作点上线性化模型,我们将在Bode图中绘制结果。
这个计算需要一秒钟。一旦创建了博德图,你可以看到这里实际上有24条不同的线,对应于24种不同条件下的引擎动力学,从14000转/分到6000转/分。你们可以看到,在发动机动力学中有很大的变化。我们刚刚绘制的结果变量叫做sys。
如果我在命令窗口中查看它,我将看到这是一个由24个传递函数组成的数组。现在我要做的是对所有这24个传递函数的PID控制器进行调整。我可以单独做,再次使用工具,如PID Tuner应用程序或Bode绘图,或控制系统设计器,或可能根轨迹绘图。
但也有程序化的方法。在控制系统工具箱中有一个叫做PID调节的函数。所以我们要做的是用这个24个传递函数的数组设计一组24个PID控制器来得到闭环带宽为10弧度每秒相位裕度为70度只用两行代码。让我们执行这个单元格。好吧。如果我们看一下计算的结果,我们看到我们有一个24个PID控制器的数组我们刚刚创建的。
让我们看看这些控制器的增益是如何改变速度的。可以同样,速度从1400转/分到6000转/分。我们看到收益正在发生相当大的变化。这里我们只看比例增益和积分增益。
让我们计算并绘制应用于24个线性对象模型的24个PID控制器的闭环步长响应。这看起来很好。
下一步,当然,在Simulink中实现这24个PID控制器。金宝app这叫做增益调度。为此,我将打开一个不同的模型。好吧。我想向你们展示的是,我们有引擎子系统。我们有PID块。
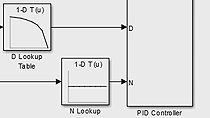
但现在,在这个PID块内部,我们选择了这个选项,将源设置为外部。当我们这样做时,该块会获得额外的PID增益导入。我们现在可以使用查找表块提供这些导入。所以您可以看到,我们正在测量速度信号。我们正在将速度信号输入查找块,查找表块.这些查找表实现了作为发动机转速函数的比例增益。
好吧。这里我们看到了形状。我们的想法是当引擎转速从1400转到6000转时,控制器增益也会相应调整。基本上,当我们改变操作条件时,我们从一个控制器切换到另一个控制器。
这里我们有一个信号构建块,在这里我们可以创建多个测试用例来测试控制器。我这里的第一个测试案例是一系列向上的小步骤和一系列向下的小步骤,来覆盖引擎的整个操作范围。让我们运行这个模拟。让我们看看结果。
好吧。这里我们看的是参考,品红色的信号,和实际的引擎速度,蓝色的信号。所以我们看到我们在操作范围内有很好的参考跟踪。
现在让我们回到模型,在这里运行一个不同的测试用例。现在我们将执行两个大步骤,从1400转/分到6000转/分,再回到1400转/分。让我们运行这个场景。让我们再次看看结果。
这里,参考是这个红色信号。实际的速度是绿色信号。你注意到这里有一些奇怪的行为,这里有一个很大的超调。信号下降到参考值需要一段时间。我们下台的时候也是这样。
这实际上就是我在网络研讨会开始时提到的积分器饱和的情况。这里发生的是,根据我们在这里选择的增益,参考和实际速度之间的误差信号足够大,以至于积分器项积分成一个大的正数。然后,你需要一段时间才能得到这个整数当我们的实际速度超过参考值时,egral项降回0。如你所见,它对控制器的性能产生负面影响。
我们可以通过添加积分器反饱和逻辑来解决这个问题。在PID控制器模块中,这非常简单。你只需选择它,这真的很容易做到。您只需选择要应用的防缠绕方法,然后单击“确定”。现在我们重新运行模拟。
让我们看看结果。让我从结果中删除上一次运行。让我们看看新的。现在你可以看到,新运行的反饱和逻辑为我们提供了非常好的性能,在上升过程中没有超调,在下降过程中没有超调。
我们还可以通过比较所创建的油门命令来了解到底发生了什么。底部的红线是油门指令在我们没有防风保护的情况下运行。蓝线是在反收卷生产的时候。如你所见,当我们转动防风保护,节气门命令从25的最大值快得多。
网络研讨会的这一部分向您展示了如何在Simulink中快速设计和实现增益调度PID控制器,以及如何防止上盘。金宝app
因此,在本次网络研讨会中,我最不想讨论的是MIMO PID控制器的设计。让我们关闭这个模型。正如我在网络研讨会开始时提到的,我们必须处理的许多系统都是具有多个输入和多个输出的系统。让我打开另一个模型。这是我们在这里看到的柴油机模型。
如果我运行模拟,你会看到信号线上的数字。这些数字表示信号的尺寸。所以我们看到参考信号是两个信号,boost参考和EGR参考。柴油机分系统的输出有升压和EGR两个信号。有两个输出是我们要控制的。我们发动机的两个输入是VGT位置和EGR升力。
这里,我们想实现一个MIMO PID控制器来实现2乘2的控制。如果你看里面,你会看到我们有一个积分增益ki,它是2乘2矩阵;比例增益kp, 2乘2矩阵;并将增益提供扰动拟合向前,也是2乘2矩阵。总共有12个我们想调优的参数。它们在默认情况下被设置为零。
如果我们看看模拟的结果,我们会发现我们根本没有很好的参考跟踪。黄线表示boost和EGR的步长变化。我们看到这些洋红色的线,实际的信号根本不跟踪参考信号。
因此,为了设计我们的MIMO PID控制器,我们可以使用一种叫做控制系统调谐器的工具。这是一个工具,您可以使用它在Simulink或MATLAB中设计任何类型的MIMO或SISO控制器。其思想是使用基本块在Simulink中指定控制器的体系结构,然后使用此工具调整控制器的参数。金宝app
让我们看看它是如何工作的。让我们在这里转到Tuning选项卡。让我们指定要调优的参数。
在我们的MIMO PID控制器中,我们想要调整这些矩阵。我们会详细说明的。然后在这里,我们可以指定一些调优目标。这里有各种各样的目标。
让我们从步骤命令跟踪开始。我们要从阶跃响应输入进行跟踪,这是我们的参考信号。让我给你们展示一下它们的信号。这是一个boost reference和EGR reference。输出信号是柴油机子系统的输出信号,升压和EGR。
我们将要求该工具设计控制器,为我们提供一个时间常数,约为5,具有闭环系统的一阶特性,并显示我们正在命令的阶跃命令,10用于增压,3用于EGR,因此您将相应地调整量级。所以你要在这里输入这些数字,10和3。我们甚至可以要求一些比5快一点的东西,所以可能是3秒。让我们点击OK。
该工具继续运行,并创建调优目标的图。洋红色的线是我们要求的响应,所以对角线上的快速响应在非对角线上是零信号以提供信道之间最小的交叉耦合。
现在我们只需按Tune,工具就会开始调整kp、ki和kff参数。现在,调整非常快,正如您所看到的。我们现在要做的就是更新Simulink模型中的块。金宝app
如果我们进入子系统内部,我们会看到所有的块参数都已更新。现在我们可以运行模拟并查看结果。现在我们看到,我们有很好的参考跟踪,交叉耦合最小。因此,当我们在增压中进行阶跃变化时,对EGR几乎没有影响。反之亦然:当我们对EGR进行阶跃变化时,对增压的影响相对较小。所以我们很快就用PID调谐器工具设计了一个MIMO PID控制器。
总之,你们看到了一个关于PID控制的快速入门。然后你看到了一个简单的工作流程关于如何进行整定,在MATLAB和Simulink中实现PID控制器。金宝app我们使用的不同产品是Simu下载188bet金宝搏link;金宝app控制系统工具箱;金宝app仿真软件控制设计;用于从输入/输出数据创建工厂模型的系统识别工具箱;鲁棒控制工具箱,这是一个产品,你需要使用控制系统调谐器;定点设计器,用于定点缩放;以及用于生成代码的嵌入式编码器。
如果您想了解更多信息,请通过谷歌“PID控制MATLAB”进入我们提供的页面,其中包含了有关如何在MATLAB和Simulink中设计和实现PID控制器的所有资源。差不多就是这样。非常感谢你。金宝app
您还可以从以下列表中选择网站:
选择中国网站(中文或英文)以获得最佳网站性能。其他MathWorks国家站点没有针对您所在位置的访问进行优化。