永磁同步电机(永磁同步电动机)校准是不可或缺的步骤在设计高性能电动牵引驱动控制。传统上,校准过程包括广泛的硬件测功器(测力计)测试和数据处理,和它的准确性很大程度上取决于校准工程师的专业知识。
基于模型的校准规范永磁同步电动机校准过程,减少不必要的测试,并生成一致的结果。这是一个被自动化工作流使用统计建模和数值优化最优校准复杂的非线性系统。它可以用于广泛的应用和是众所周知的是采用内燃机控制校准。当应用于电机控制校准时,基于模型的标定工作流程可以帮助运动控制工程师实现最优转矩和场强减弱控制永磁同步电动机。
永磁同步电动机特性和校准:挑战和需求
永磁同步电动机与其他类型的脱颖而出e-motors由于其效率高、转矩密度。这是因为机器内的永久磁铁可以生成大量的气隙磁通没有外部激励。这种特殊的特质使永磁同步电动机的极佳人选non-traction和牵引电动机驱动的应用程序。
大多数non-traction永磁同步电动机的应用程序只需要机器在恒转矩区,其控制方案相对简单。牵引永磁同步电动机的控制,除了快速动态响应,还需要精确的转矩输出和宽恒马力范围操作。为了实现这些控制的目标,特别是在电动或混合动力电动汽车,牵引永磁同步电动机必须操作场强减弱地区,转矩之间的权衡需要,速度和效率。
很大一部分设计一个高性能的场强减弱控制算法校准场强减弱控制查找表。生成表数据之前,永磁同步电动机特性测试常常需要执行使用一个绝妙的设置或通过一个有限元分析工具ANSYS麦克斯韦或JSOL JMAG。
永磁同步电动机性能测试后,磁链表和测量扭矩在不同电流和速度可以获得操作点。在这里我们需要区分永磁同步电动机描述从校准。永磁同步电动机特性包括执行一系列测试在测力计或使用一个有限元分析工具,提取重要的机器信息的目标,如磁链和转矩。永磁同步电动机控制校准涉及计算控制器查找表,将产生最大转矩或最优效率在不同的操作点。控制校准过程通常发生在永磁同步电动机特性。两个过程所需的高性能永磁同步电动机控制的设计。
基于模型的标定工作流程
应用于永磁同步电动机控制校准时,基于模型的标定工作流程通常涉及四个步骤(图1):
- 为描述设计实验。
- 永磁同步电动机特性数据集进行预处理。
- 合适的永磁同步电动机特性模型。
- 优化永磁同步电动机控制器查找表的数据。
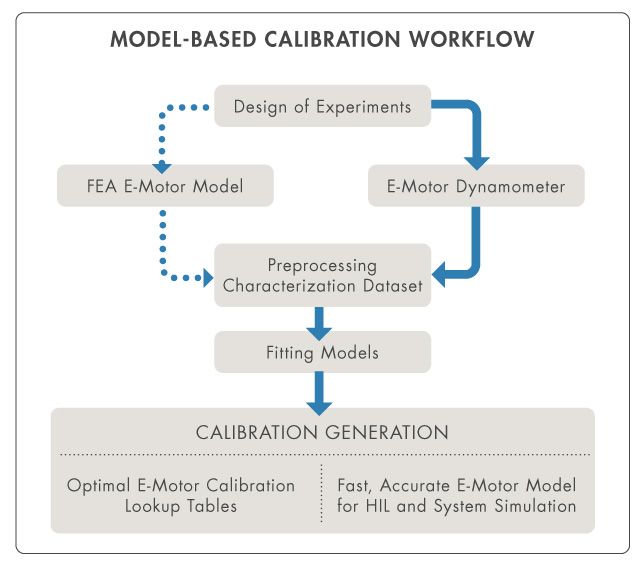
图1所示。基于模型的标定工作流永磁同步电动机控制校准。
1。设计特性的实验
完整的阶乘描述物理测力计是浪费的,因为它增加实验时间,成本,和维护。在基于模型的标定,统计间隔操作点提出了测试点。实验是否进行有限元分析中的物理测力计或环境,生成的测试点的当前id和智商将控制命令和永磁同步电动机速度将受到的绝妙的机器或一组有限元分析工具。使用虚拟功率计需要一个详细的永磁同步电动机有限元分析模型。然而,一旦创建了模型,它可以在更全面的测试组操作点不会导致额外的成本开销。
2。数据集预处理的永磁同步电动机表征
在永磁同步电动机特性、转矩和dq-axis磁链动态数据直接测量在或来自一个有限元分析工具对每个操作id,智商,和速度。描述后,数据集是由扭矩轮廓和速度的步骤,重新安排,每个变量(例如,扭矩)存储在一个单列格式,然后导入到基于模型的标定工具箱™(图2)。如果有必要,可以去除外围数据执行额外的分析。异常是常见的物理测试中由于噪声和测量误差。

图2。数据集的操作点导入基于模型的标定工具箱。
3所示。合适的永磁同步电动机特性模型
模型拟合的一个至关重要的部分是基于模型的标定工作流程。(注:本文中的模型称为不是电动马达或控制器模型;他们是统计模型的功能,如高斯过程回归或径向基函数表示变量之间的关系在导入数据集)。具体地说,两组模型创建:智商作为id和转矩的函数,和电压作为id和转矩的函数。每个在一组通用的电机速度建模。这些速度作为最后的断点控制器查找表。图3显示了由两个速度模型分组操作点:1000 rpm和5000 rpm。
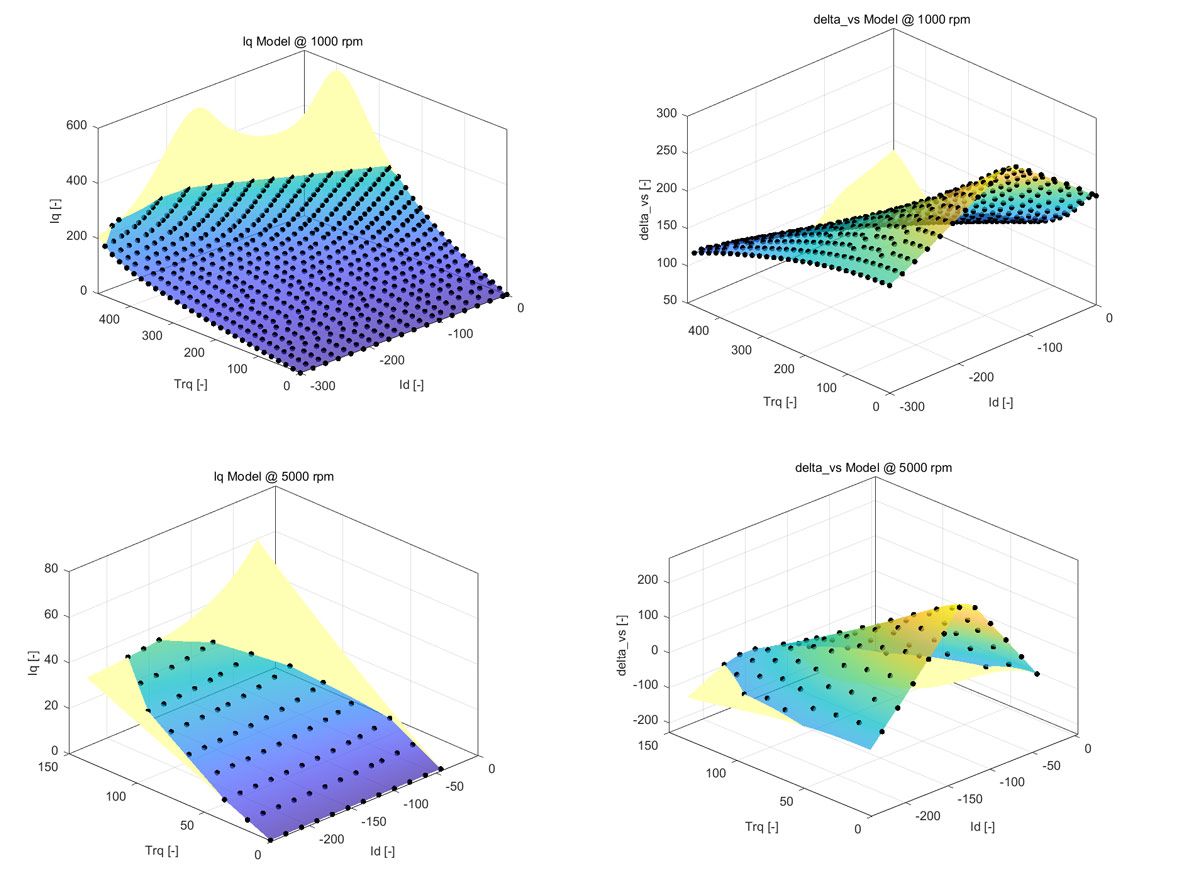
图3。智商和电压幅度的例子(delta_vs)模型在不同的速度操作点。
智商和电压幅度模型随速度操作点,速度可以直接影响操作的边界。是不可能完全代表操作边界从有限数目的特征数据点。永磁同步电动机的实际运行边界下校准通常由外部强加的限制等因素的热极限传动系统和逆变器的直流母线电压水平。
在基于模型的标定,操作的边界拟合模型近似凸壳封闭数据集,所描绘的边缘颜色的表面,如图3所示。这些边界是重要步骤4的校准工作流程,因为它们是作为约束条件的优化问题。
4所示。优化永磁同步电动机控制器查找表的数据
在基于模型的标定,进程的运行优化程序并生成最终的校准执行查找表使用笼时,基于模型的标定工具箱中的校准生成工具。从步骤3在笼中,模型可以用于模型目标函数或约束。例如,电压幅度模型被用作电压限制在不同的速度来保证整个调制电压不超过最大施加的直流总线电压。除了约束外,还可以设置单个或多个目标基于这些拟合模型。
优化的场强减弱控制一个共同的目标是最大化永磁同步电动机的效率而达到所需的扭矩。这是通过设置torque-per-ampere (TPA)作为目标最大化,同时强制电流和电压约束。结果是一个优化的操作区域覆盖最大转矩/安培(吨),每伏特(MPTV)最大扭矩,操作点。
图4显示了一个查找表的优化操作点是通过笼子里的过程。浅蓝色和黄色阴影区域表示相应的电流和电压限制在一个特定的速度操作点,绿色区域是可行的区域满足这两个约束。情节的扭矩轮廓代表一个特定的扭矩要求。达到最大效率控制的永磁同步电动机,优化器在笼子里搜索可行的地区内的转矩轮廓找到最大化TPA的目标。结果,如图4所示的示例中,点a将被选为最优。图4中的其他优化的查找表点相同的常规计算了笼子。

图4。TPA约束条件下优化。
你可以加速上述优化程序运行并行计算工具箱™。启用了并行计算,整个工作流在10分钟内收敛在一个典型的四核的电脑。
运行优化程序后,可以填写最终的校准查找表的优化结果通过各种填充方法,如插值或剪裁。理论上,你可以选择任何转矩和速度查找表的断点,但是一个共同的选择断点的扭矩的比例是最大扭矩。选择转矩百分比最大实现转矩而非绝对扭矩值确保满整个查找表可以有效优化结果(图5)。
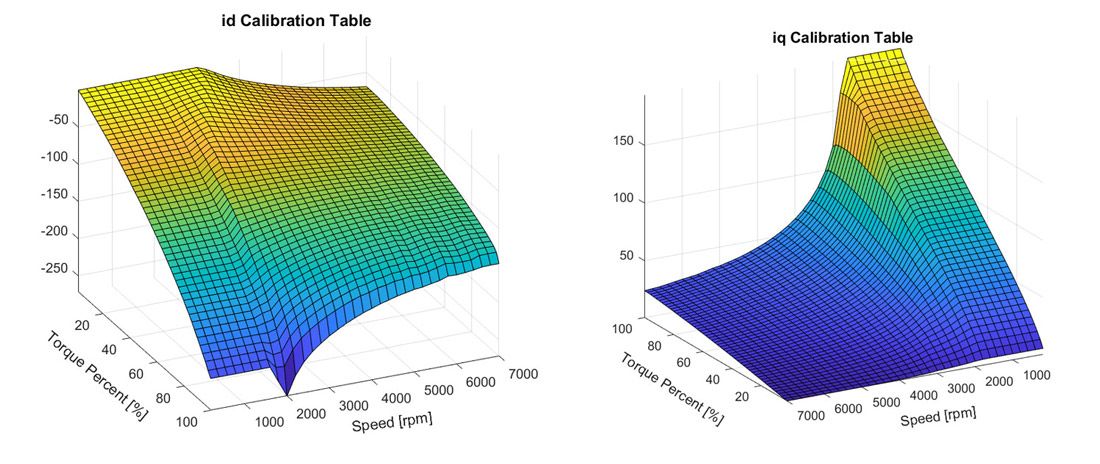
图5。包括优化id和智商校准表与场强减弱。
扩展的工作流
本文介绍了基本的基于模型的标定工作流程优化永磁同步电动机转矩控制查找表的生成与场强减弱。本文中描述的示例是基于场强减弱扭矩命令控制表,速度,甚至直流总线电压输入。
对于一个算法,它使用转矩命令和最大磁链作为输入查找表,工作流是相同的,只有稍微不同的函数模型。此外,如果您的应用程序需要更准确和精炼校准,你可以考虑更多的变量,如逆变器电压降、核心损失,交流电阻,和游隙或摩擦,在模型拟合和笼子里的过程。