主要内容
基本模型
线性系统的常见模型,如传递函数和状态空间模型
数值线性时不变(LTI)模型是用来表示线性系统的基本构件。数字LTI模型对象允许您以常用的表示形式存储动态系统。例如,tf模型以其分子和分母多项式的系数表示传递函数,以及党卫军模型根据其状态空间矩阵表示LTI系统。还有一些LTI模型类型专门用于表示PID控制器的比例、积分和微分系数。
通过将单个组件表示为LTI模型,并将组件连接起来对控制体系结构建模,从而构建一个更复杂的控制系统模型。例如,请参见基于模型对象的控制系统建模.
功能
话题
开始
模型对象可以表示设备、执行器、传感器或控制器等组件。连接模型对象以构建表示多个元素组合响应的聚合模型。
模型对象将线性系统表示为以结构化方式封装模型数据和属性的专用数据容器。
使用模型对象的方法包括线性分析、补偿器设计和控制系统调整。
连续时间模型
此示例演示如何使用创建连续时间线性模型tf,zpk,党卫军,联邦德国命令。
用分子和分母系数或零、极点和增益表示传递函数。
用状态空间矩阵表示状态空间模型。
用不同频率下响应的幅度和相位表示动态系统。
用控制器增益或时间常数表示PID控制器。
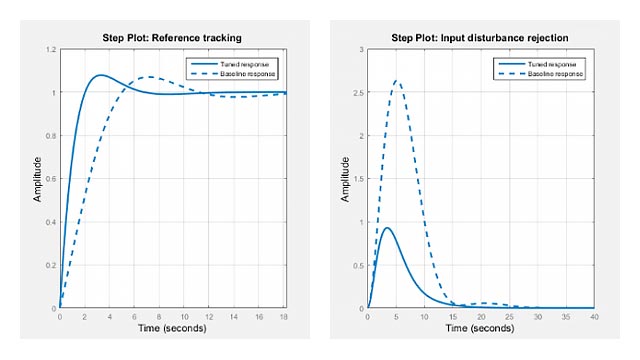
二自由度PID控制器可以在不增加超调量的情况下实现更快的抗扰控制。
此示例显示了使用LTI模型的一些最佳实践。
离散时间模型
此示例演示如何使用创建离散时间线性模型tf,zpk,党卫军,联邦德国命令。
通过在创建模型对象时指定采样时间来表示离散时间数值模型。
离散时间PID控制器中的积分器项和滤波器项可以用几个不同的公式表示。
再分配模型
通过串联SISO传递函数或为每个I/O通道指定系数集来创建MIMO传递函数。
这些示例展示了如何将MIMO系统表示为状态空间模型。
使用系统中多个I/O对的频率响应数据来创建MIMO频率响应模型。
从MIMO动态系统模型中提取特定的I/O通道。
你也可以从以下列表中选择一个网站: