分析设计PID调谐器
确定PID控制器是否符合您的需求,您可以分析系统响应使用PID调谐器响应的阴谋。
情节系统响应
确定补偿器设计是否符合您的需求,您可以使用响应分析系统响应的情节。在PID调谐器选项卡上,选择一个响应的阴谋添加图菜单。的添加图菜单也允许您选择从几个步骤情节(时域响应)或预示情节(频域响应)。

1-DOF PID控制器类型如π,PIDF, PDF,软件计算系统响应基于以下单回路控制架构,在那里G是你指定的工厂和CPID控制器:
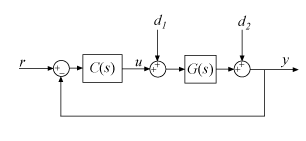
二自由度PID控制器类型如皮,PIDF2, I-PD,软件计算响应基于以下结构:

系统的分解反应是基于二自由度PID控制器,C成一个定位点组件Cr和一个反馈组件Cy描述的一样,二自由度PID控制器。
下表总结了可用响应分析情节。
| 响应 | 绘制系统(1-DOF) | 绘制系统(双自由度) | 描述 |
|---|---|---|---|
植物 |
G | G | 植物响应。使用动态检查工厂。 |
开环 |
GC | gcy | 开环controller-plant系统的响应。使用频域设计。 时使用你的设计规范包括鲁棒性标准,如开环增益裕度和相位。 |
参考跟踪 |
(从r来y) |
(从r来y) |
闭环系统阶跃变化的反应定位点。时使用你的设计规范包括选点跟踪。 |
控制器工作 |
(从r来u) |
(从r来u) |
闭环控制器输出响应定位点的阶跃变化。时使用你的设计受限于实际约束,如控制器饱和。 |
输入干扰抑制 |
(从d1来y) |
(从d1来y) |
闭环系统对负载扰动(步骤核电站扰动输入)。时使用你的设计规范包括输入扰动被拒绝。 |
输出干扰抑制 |
(从d2来y) |
(从d2来y) |
闭环系统在植物响应扰动步输出。使用当您想要分析灵敏度建模错误。 |
调谐响应阻止响应进行比较
默认情况下,PID调谐器情节系统响应同时使用:
PID控制器在模型中的系数值金宝app®模型(块响应)。
电流的PID系数值PID调谐器设计(调谐响应)。
当你调整电流PID调谐器设计,通过移动滑块等调谐响应情节的变化,虽然块响应情节不。

写当前的PID调谐器设计仿真软件模型,点击金宝app![]() 。当你这样做时,电流调谐响应就变成了块响应。进一步调整当前的设计创建了一个新的调谐响应线。
。当你这样做时,电流调谐响应就变成了块响应。进一步调整当前的设计创建了一个新的调谐响应线。
隐藏的块响应,点击![]() 选项和清晰的显示块响应。
选项和清晰的显示块响应。
查看系统特性的数值
您可以查看系统特征值,如峰值响应和增益裕度,:
直接在反应情节——使用右键菜单添加特征,表现为蓝色标记。然后,鼠标左键单击标记来显示相应的数据面板。
在性能和鲁棒性表——显示这个表,点击
 显示参数。
显示参数。

出口植物或控制器MATLAB工作空间
您可以导出线性化植物模型计算PID调谐器MATLAB的®工作区进行进一步分析。为此,单击更新块并选择出口。

在导出对话框中,请您要导出的模型。点击好吧出口植物或控制器到MATLAB工作区状态(党卫军)模型对象或pid对象,分别。
完善的设计
如果响应的初始控制器设计不符合您的需求,您可以交互地调整设计。PID调谐器给你两个域选择精炼控制器设计:
时间域(默认)——使用响应时间滑块,使控制系统的闭环响应更快或更慢。使用瞬态行为滑块在干扰抑制控制器更积极和更健壮的植物不确定性。频率——使用带宽滑块,使闭环控制系统的响应快慢(响应时间是2 /wc,在那里wc是带宽)。使用阶段保证金滑块在干扰抑制控制器更积极和更健壮的植物不确定性。
在两种模式下,都有一个参考跟踪和干扰抑制性能之间的权衡。为例,展示了如何使用滑块来调整这个权衡,明白了调整PID控制器支持参考跟踪或抑制干扰。
一旦你找到一个补偿器的设计,满足您的要求,确认其行为以类似的方式在模型的非线性模型。金宝app说明,请参阅验证模型的PID设计模型金宝app。
提示
回到最初的控制器设计移动滑块后,点击![]() 重新设计。
重新设计。