主要内容
rectifyStereoImages
纠正一对立体图像
句法
描述
[的未扭曲和纠正版本j - 1那J2) = rectifyStereoImages (I1那I2那斯特雷托姆的)I1和I2输入图像使用立体参数存储在斯特雷托姆对象。
立体图像校正将图像投影到一个公共的图像平面上,使相应的点具有相同的行坐标。这种图像投影使图像看起来好像两个摄像机是平行的。使用disparitybm.或disparitysgm.函数从纠正的图像计算视差图,用于3-D场景重建。
例子
纠正立体影像
指定包含校准的棋盘的图像。
imageDir = fullfile (toolboxdir ('想象'),'VisionData'那......'校准'那“立体”);leffimages = imagedataStore(fullfile(imagedir,“左”));Rightimages = ImageageAtastore(fullfile(imagedir,“对”));
检测棋盘。
[imagePoints, boardSize] = detectCheckerboardPoints (......leftimages.files,trainimages.files);
指定Checkerboard Keypoints的世界坐标。
squareSizeInMillimeters = 108;worldPoints = generateCheckerboardPoints (boardSize squareSizeInMillimeters);
阅读图像中。
I1 = ReadImage(左幅,1);I2 = ReadImage(RightImages,1);图像zize = [size(i1,1),size(i1,2)];
校准立体摄像系统。
stereoParams = estimateCameraParameters (imagePoints worldPoints,......“图象尺寸”,图片尺寸);
使用“完整”输出视图纠正图像。
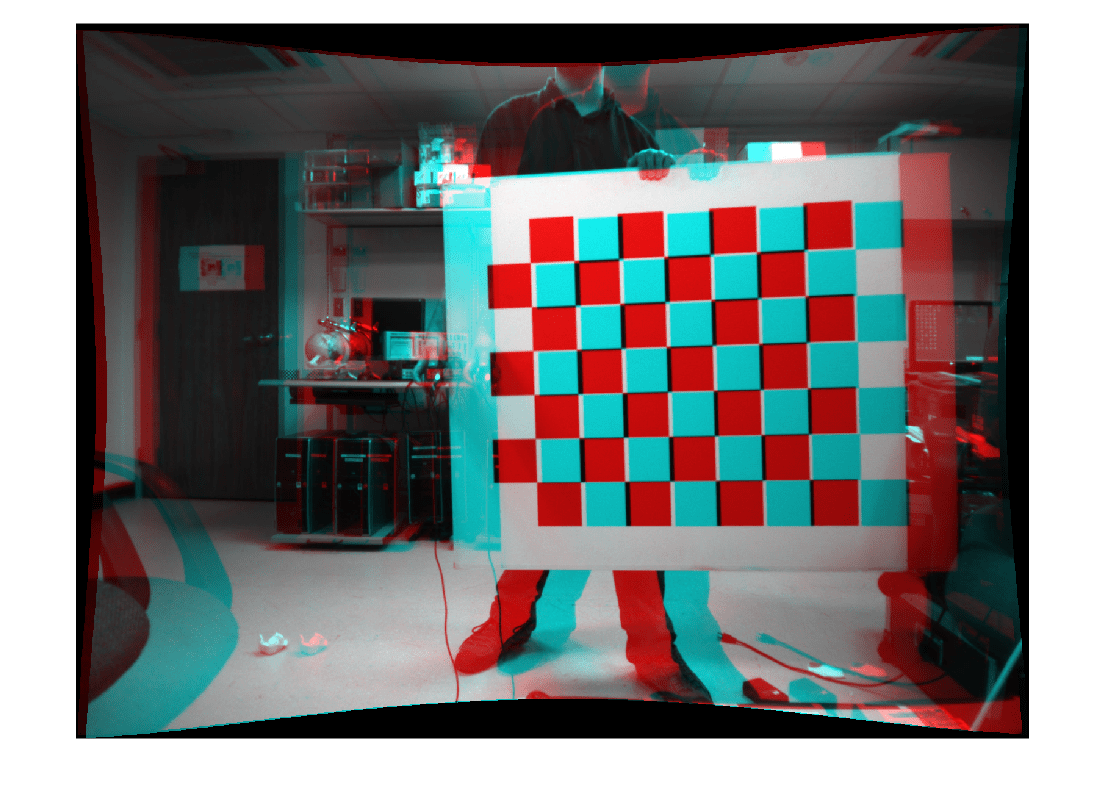
[J1_full, J2_full] = rectifyStereoImages (I1、I2 stereoParams,......“OutputView”那“全部”);
显示'full'输出视图的结果。
图;imshow(立体式(J1_FULL,J2_FULL)));
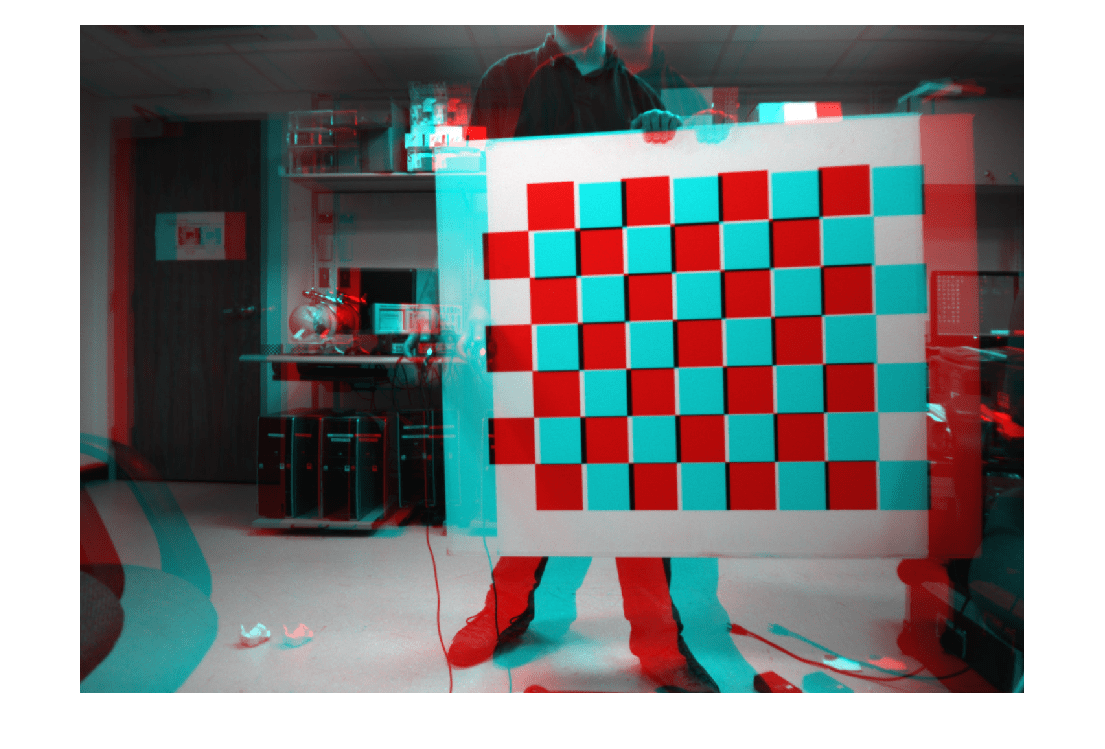
使用“有效”输出视图纠正图像。这最适合计算差异。
[J1_VALID,J2_VALID] = rectifyStereoImages(I1,I2,Stereoparams,......“OutputView”那“有效”);
显示“有效”输出视图的结果。
图;imshow (stereoAnaglyph (J1_valid J2_valid));
输入参数
输出参数
提示
计算机Vision Toolbox™整流算法要求每个图像的eBipole位于图像之外。如果eBipole位于图像内,则可以首先将图像转换为极性坐标,如Marc Pollefeys,Reinhard Koch和Luc Van Gool所提出的整流方法中所述[2].
参考文献
[1] G. Bradski和A. Kaehler,学习OpenCV:与OpenCV库的计算机愿景.加州塞瓦斯托波尔:奥莱利,2008。
扩展能力
也可以看看
reconstructScene|disparitybm.|disparitysgm.|估计值|estissuncalibratedrecification.|stereoParameters|相机校准器|立体相机校准器
介绍了R2014a
你也可以从以下列表中选择一个网站:
