Model Predictive Control Toolbox™ lets you design and simulate model predictive controllers to control multi-input multi-output systems subject to input/output constraints for applications such as advanced driver-assistance systems, process control, powertrain control, and robotics.
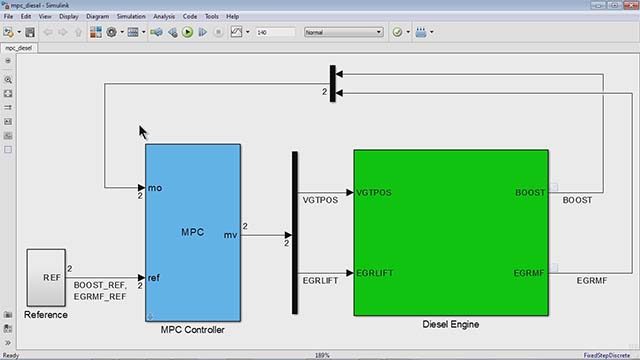
Using the MPC Designer app, you can define an internal plant model, specify parameters such as prediction and control horizons, constraints, and controller weights. You can interactively tune your MPC controller, simulate it against the linear plant model, and verify its performance by running it against the nonlinear Simulink®model.
You can adjust weights, constraints, prediction and control horizons of your MPC controller at run time. For nonlinear plants with a wide operating range, you can implement adaptive MPC controllers that let you update the internal plant model at each computation step. Alternatively, for highly nonlinear plants, you can design nonlinear MPC controllers using nonlinear prediction models, cost functions and constraints. Alternatively, for highly nonlinear plants, you can design nonlinear MPC controllers using nonlinear prediction models, cost functions and constraints.
For applications with fast sample times, you can use explicit MPC controllers that require fewer run-time computations than traditional MPC controllers by using optimal solutions precomputed offline. Another option to ensure you won’t exceed the desired execution time is to use an approximate solution by limiting the number of iterations for the solver.
The toolbox provides built-in solvers for linear MPC problems. For Nonlinear MPC problems the toolbox lets you use fmincon with SQP solver from optimization toolbox and FORCESPRO solver developed by Embotech. Additionally you can also use custom solvers to simulate and generate code for linear and nonlinear MPC controllers.
The toolbox supports C code and IEC-61131 Structured Text generation for targeting embedded microprocessors and PLCs.
For more information on Model Predictive Control Toolbox™, please return to the product page.